Major site overhaul: resources hub, content migration, new blog posts, forms
- Redesign /resources as sectioned hub with category pages - Migrate 645 Squarespace CDN images to local /images/content/ - Create 9 new news/blog posts with event photos - Fix blog post slugs (rename gibberish filenames) - Rename Design Blog to Design Blogs across site - Remove education page, replace with Platform in nav - Redesign rover repair request form with dynamic rover entries - Add school search combobox to contact, store, and repair forms - Extract shared KNOWN_SCHOOLS data - Make /rover-expansion-3d-printing dynamically pull from MDX - Add related resources sections to product pages - Fix homepage broken /quote links to /store - Store page: sample kit cards, inline quote builder, mailing list opt-in
This commit is contained in:
@@ -1,13 +1,13 @@
|
||||
---
|
||||
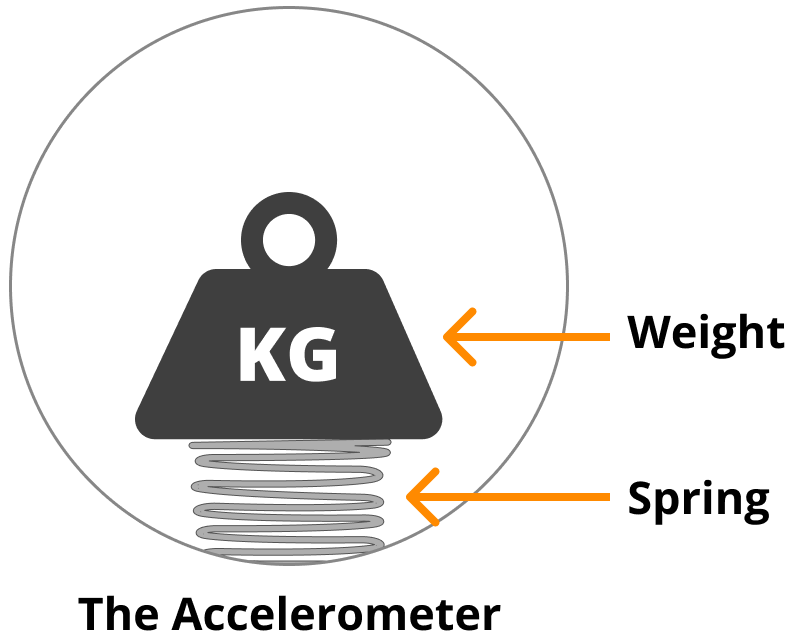
title: "The Accelerometer"
|
||||
date: "2021-06-22"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Sensor Guides"]
|
||||
tags: []
|
||||
excerpt: "Learn what the accelerometer is and how to code it."
|
||||
featuredImage: "/images/resources/accelerometer.gif"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
The accelerometer is one of the the five sensor types on the Micromelon Rover. The accelerometer is a component built into the Rover’s PCB (printed circuit board). It’s only about a 2.5mm x 3.0mm wide and 0.83mm tall. That component also includes another sensor, the gyroscope.
|
||||
|
||||
@@ -23,9 +23,7 @@ Before we get into the mechanics of an accelerometer, we need to cover some phys
|
||||
|
||||
Acceleration is the change in velocity of an object. For example when you go from a walk to a run, you are accelerating by using the forces you generate with your muscles. As you slow down, you decrease your acceleration. All movement has a rate of acceleration. Whenever our rovers are moved, either by a force like gravity or the rotation of their motors, that movement also have a rate of acceleration.
|
||||
|
||||
**Forces**
|
||||
|
||||
When we push our rover, we are applying a force to it. When that force is unopposed the rover will be in motion. Anything that can apply motion to the Rover and change its position in space is considered a force. We can organize all forces into two categories, **static forces** & **dynamic forces**.
|
||||
**Forces** When we push our rover, we are applying a force to it. When that force is unopposed the rover will be in motion. Anything that can apply motion to the Rover and change its position in space is considered a force. We can organize all forces into two categories,** static forces**&** dynamic forces**.
|
||||
|
||||
**Dynamic Force**
|
||||
|
||||
@@ -45,11 +43,11 @@ The accelerometer on the Rover is a MEMS accelerometer. MEMS stands for microele
|
||||
|
||||
Depending on how the spring contracts, expands, and tilts, the accelerometer can measure acceleration.
|
||||
|
||||
|
||||

|
||||
|
||||
Simplified Accelerometer Example
|
||||
|
||||

|
||||

|
||||
|
||||
Let’s walk through an example where the outside force is gravity.
|
||||
|
||||
@@ -59,19 +57,15 @@ Let’s walk through an example where the outside force is gravity.
|
||||
|
||||
- When the rover is flipped upside down, the accelerometer is as well. The weight is still pulled down by gravity but now the spring is extending.
|
||||
|
||||
**When the spring compresses & extends, the accelerometer can detect there is force being applied to the rover. **
|
||||
|
||||
So we have a rough idea of how the accelerometer is able to determine that force is being applied. Let’s talk now about how it communicates to us where the force is coming from. ** **
|
||||
**When the spring compresses & extends, the accelerometer can detect there is force being applied to the rover.** So we have a rough idea of how the accelerometer is able to determine that force is being applied. Let’s talk now about how it communicates to us where the force is coming from.** **
|
||||
|
||||
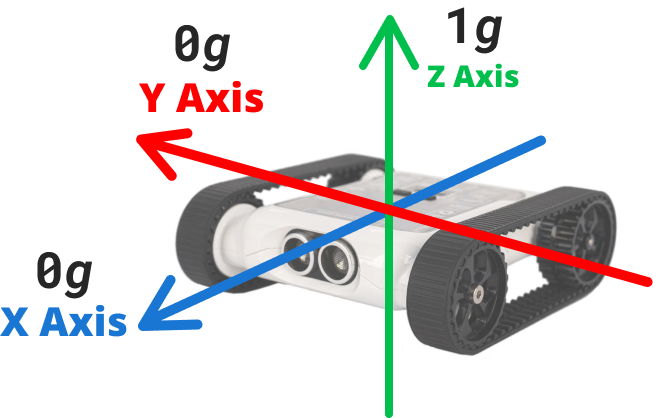
**The 3 Axes Of Movement**
|
||||
|
||||
With the accelerometer, our Rover can detect its acceleration, but it needs a way to communicate it. It would be a bit confusing if our Rover told us *“hey I’m accelerating down but I’m upside down so I’m moving in this direction but also accelerating to the side as well to my right, your left…”*. This is a bit confusing. We need a simple way for us to understand and communicate the rover’s direction of motion. This is what the axes of movement are for.
|
||||
|
||||

|
||||

|
||||
|
||||
**The X, Y, and Z axes**
|
||||
|
||||
The **X axis **runs from back to front of the rover. The **Y axis** runs across the rover middle from left to right. The **Z axis** runs up and down through the rover.
|
||||
**The X, Y, and Z axes** The ** X axis** runs from back to front of the rover. The ** Y axis** runs across the rover middle from left to right. The ** Z axis** runs up and down through the rover.
|
||||
|
||||
As the rover moves, these axis stay localized to the rover. So as the rover rotates, the axis rotate with it. You can see where the 3 Axes are on the rover and how they move when it rotates.
|
||||
|
||||
@@ -79,11 +73,11 @@ As the rover moves, these axis stay localized to the rover. So as the rover rota
|
||||
|
||||
Let’s look back at our weight and spring example and apply the 3 axis of movement to it. Remember, the 3 axis are localized to the rover. As the Rover rotates, the axis rotate as well.
|
||||
|
||||

|
||||

|
||||
|
||||
The force of gravity is applied downwards on the Rover as it sits flat. **The accelerometer detects force of gravity against the Z axis**.** **
|
||||
|
||||

|
||||

|
||||
|
||||
When the rover flips over the force is still applying downwards but to the Rover’s underside. **The accelerometer detects force of gravity going with the Z axis.**
|
||||
|
||||
@@ -95,19 +89,17 @@ The accelerometer is a device built into the Rover. As forces like gravity, our
|
||||
|
||||
Similar to how the Rover may use the accelerometer to help balance itself, humans also have a form of accelerometer we use to balance. Our accelerometer is in our ear, specifically a part of our ear called the inner ear.
|
||||
|
||||
**How the Inner Ear Helps Us Balance**
|
||||
|
||||
The inner ear has a lot of parts, not all of them are to help us balance. Three parts that do help us balance are the three semicircular canals. These are named the **posterial**, **anterior **& **lateral **canals.
|
||||
**How the Inner Ear Helps Us Balance** The inner ear has a lot of parts, not all of them are to help us balance. Three parts that do help us balance are the three semicircular canals. These are named the ** posterial**,** anterior **&** lateral** canals.
|
||||
|
||||
Inside these canals are tiny hairs and liquid. As we move our head the liquid inside the canals shifts back and forth. The tiny hairs detect the liquid moving and send signals to our brain.
|
||||
|
||||
Our Rover’s accelerometer is designed to understand movement along 3 axes. Our inner ear does the same, each semicircular canal is responsible for an axis. The Lateral canal is for our Z axis, the Anterior for our Y axis and the Posterior for the X axis.
|
||||
|
||||

|
||||

|
||||
|
||||
Diagram of the ear
|
||||
|
||||

|
||||

|
||||
|
||||
Diagram of the inner ear
|
||||
|
||||
@@ -117,19 +109,19 @@ Open up the Code Editor, connect to a Micromelon Rover and open up the sensor vi
|
||||
|
||||
In the sensor view dialog, the accelerometer values are located in the bottom right table. The first column of the table is the accelerometer values. Move the rover around and take note of how the X, Y and Z values change.
|
||||
|
||||

|
||||

|
||||
|
||||
**Understanding Accelerometer Values**
|
||||
|
||||
The values you see in the accelerometer column are g-force values. G-force ( *g )* is a standard unit of measurement for force. 1*g* equals the same amount of force applied by Earth’s gravity. When a Rover is in free-fall, with no external forces, it will read 0*g *in all axes.
|
||||
|
||||
|
||||

|
||||
|
||||
**Demonstrating G-Force**
|
||||
|
||||
Rest the rover up right on a flat surface, you will see both the X and Y value are roughly 0*g*, however the Z value will be roughly 1*g*. The only force applied to the rover is Earth’s gravity, pushing down on the Z-axis.
|
||||
|
||||

|
||||

|
||||
|
||||
If you flip the rover upside down, X and Y will still be roughly 0*g*. The Z axis will be equal to roughly -1*g*. This is because Earth’s gravity is now going the other way on the Z axis.
|
||||
|
||||
@@ -141,7 +133,7 @@ Most of the time while using your rover, you will only see accelerometer reading
|
||||
|
||||
Let’s write a simple program to change our Rover’s LEDs depending on the value of the z axis of our accelerometer.
|
||||
|
||||
|
||||

|
||||
|
||||
- Start by adding an **IF/ELSE** block.
|
||||
|
||||
@@ -149,9 +141,7 @@ Let’s write a simple program to change our Rover’s LEDs depending on the val
|
||||
|
||||
- Change the **X Axis** dropdown to ** Z Axis**.
|
||||
|
||||
The python command for reading the Z axis is **IMU.readAccel(2)**
|
||||
|
||||
- Change the second value on the **< condition** block from **10 to 0**. This will check if the value is either positive or negative.
|
||||
The python command for reading the Z axis is **IMU.readAccel(2)**- Change the second value on the **< condition** block from ** 10 to 0**. This will check if the value is either positive or negative.
|
||||
|
||||
- Inside the IF/ELSE block true case, place an **Set All LEDs** block. You can find this in the ** Lights/Sound** category.
|
||||
|
||||
@@ -166,189 +156,3 @@ While this code is running, we will see the Rover LEDs change to our selected co
|
||||
### Wrapping Up
|
||||
|
||||
Now that we’re familiar with what the accelerometer is, how it works, and how to program it, it’s time to start doing some activities. Try these activities that require using the accelerometer.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/balance-bot)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
[Activity: Balance Bot](/resources/balance-bot)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
Learn iteration, algorithm design, maths, and how to use the Rover’s accelerometer and motors.
|
||||
|
||||
[Read More →](/resources/balance-bot)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/windup-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Wind-up Rover](/resources/windup-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn iteration, variables, maths, and how to use the Rover’s motors and accelerometer.
|
||||
|
||||
[Read More →](/resources/windup-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/flip-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Flip Bot](/resources/flip-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn branching, iteration, and how to use the accelerometer.
|
||||
|
||||
[Read More →](/resources/flip-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/turn-over-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Turn Over Rover](/resources/turn-over-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn branching, iteration, and how to use the accelerometer and LEDs.
|
||||
|
||||
[Read More →](/resources/turn-over-rover)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -15,25 +15,22 @@ The initial activity can be to have an indicator line on the ground using tape,
|
||||
|
||||
Any object can be used in place of our Meloncube, however, if you wish to use it, head on over to Printables or Thingiverse to download the print file:
|
||||
|
||||
[
|
||||
Printables: MelonCube
|
||||
](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
[Printables: MelonCube](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
|
||||
[Thingiverse: MelonCube](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
[
|
||||
Thingiverse: MelonCube
|
||||
](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
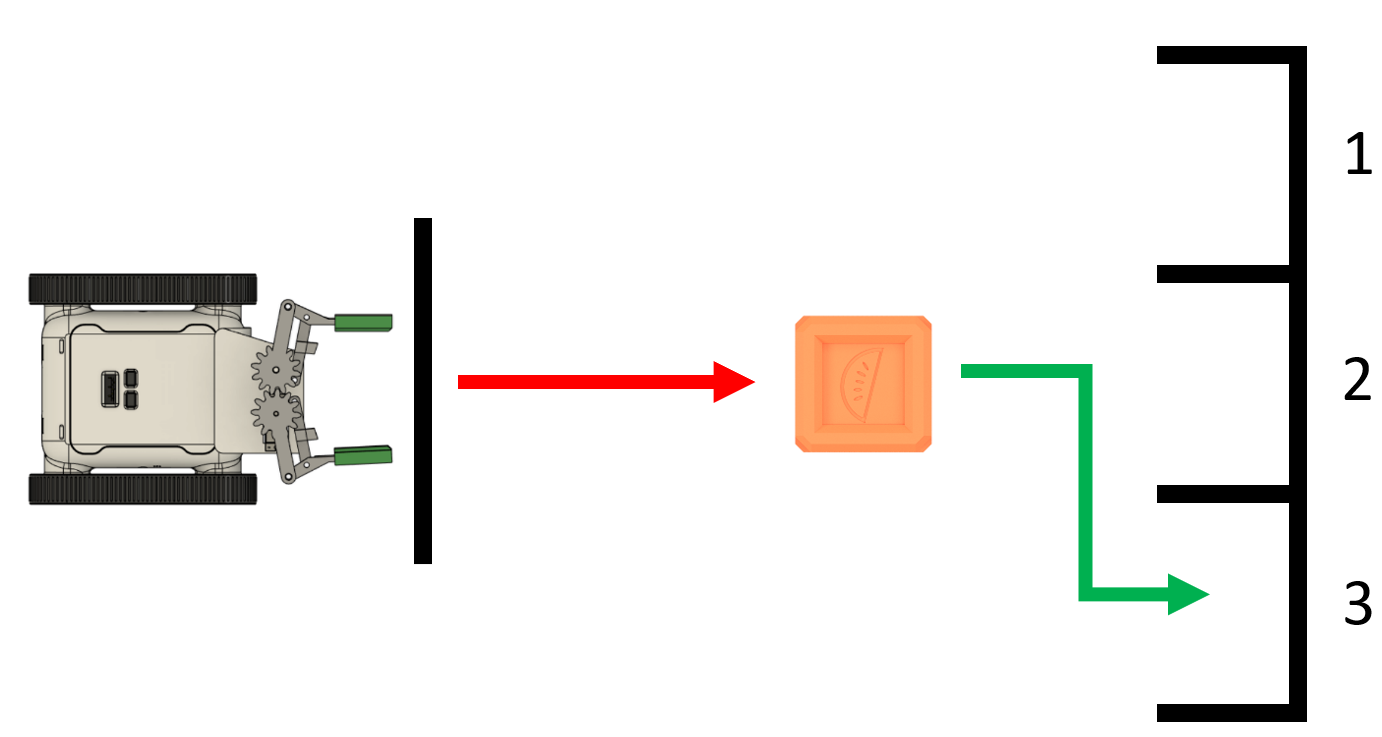
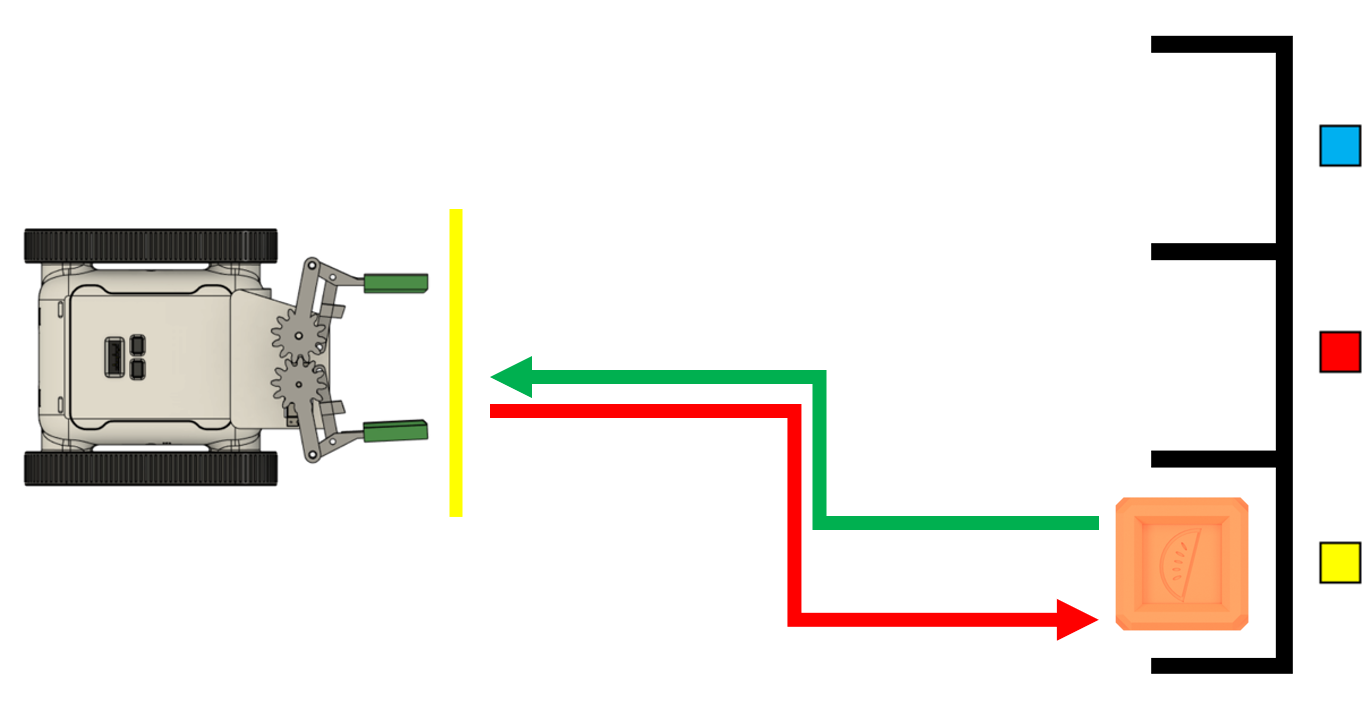
Depots are walled square areas for the rover to deposit a Meloncube in. The walls can be constructed from tape on the ground or solid materials in a 20cm x 15cm area. Use the diagrams below as a reference for the layout of the depots. A number can be allocated to each depot, and students can deliver the cube to each depot on demand.
|
||||
|
||||
Add coloured tape to the previous challenge to add more complexity. The tape could indicate which depot the cube must be delivered to. The rover can use the colour sensor to detect the colour of the tape and use the appropriate delivery instructions. A final extension challenge is leaving the cube in one of the depots and having the rover retrieve it and put it behind the indicator line.
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
### Here’s Our Approach
|
||||
|
||||
@@ -41,19 +38,19 @@ Add coloured tape to the previous challenge to add more complexity. The tape cou
|
||||
|
||||
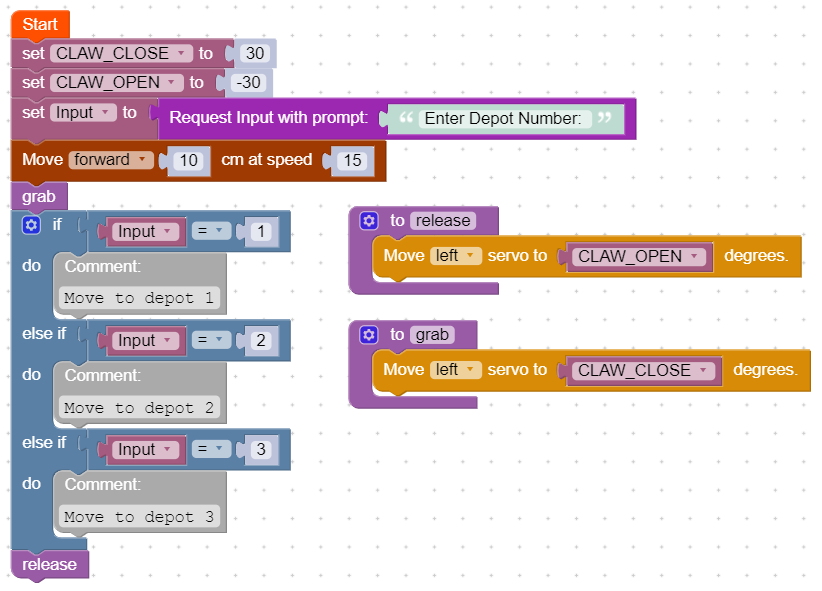
#### 1) Setting the Constants:
|
||||
|
||||

|
||||

|
||||
|
||||
Start by defining two constants: the servo claw open and close positions. Trial and error will have to be used to find the correct settings for your rover.
|
||||
|
||||
#### 2) Grab and Release:
|
||||
|
||||

|
||||

|
||||
|
||||
Next, make two functions for ‘*grab*’ and ‘*release’. *While these functions only have the ‘Move Servo’ block, doing this makes it easier to understand the code.
|
||||
|
||||
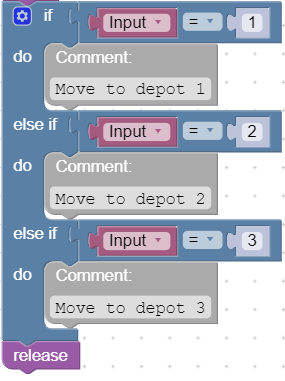
#### **3) Data Input:**
|
||||
|
||||

|
||||

|
||||
|
||||
In the main code, we’ll make a variable named ‘Input’, which will request the depot number to deliver the cube.
|
||||
|
||||
@@ -61,78 +58,20 @@ If you’re using colour indicators instead, the input request can be replaced w
|
||||
|
||||
#### **4) Secure the Cube:**
|
||||
|
||||

|
||||

|
||||
|
||||
Once the robot has acquired the delivery instructions, the robot will approach the cube and use the ‘*grab*‘ function to pick up the meloncube.
|
||||
|
||||
#### 5) Delivering the Cube:
|
||||
|
||||
|
||||

|
||||
|
||||
Depending on how your depots are set up, create delivery instructions using movement blocks to deliver the cube. Finish off the code by releasing the cube.
|
||||
|
||||
#### Complete Code:
|
||||
|
||||
|
||||

|
||||
|
||||
**Tip:**
|
||||
|
||||
You can add tracks on the ground for the rover to line-follow or create maze walls to allow the use of the IR sensors for navigation.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -51,7 +51,7 @@ Servo interpolation is a technique we implemented to smooth out the servo moveme
|
||||
|
||||
#### 1) Setting the Constants:
|
||||
|
||||
|
||||

|
||||
|
||||
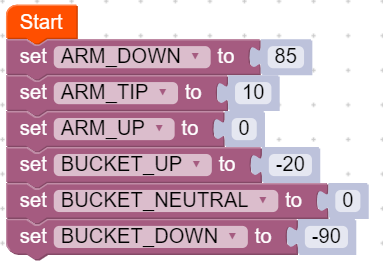
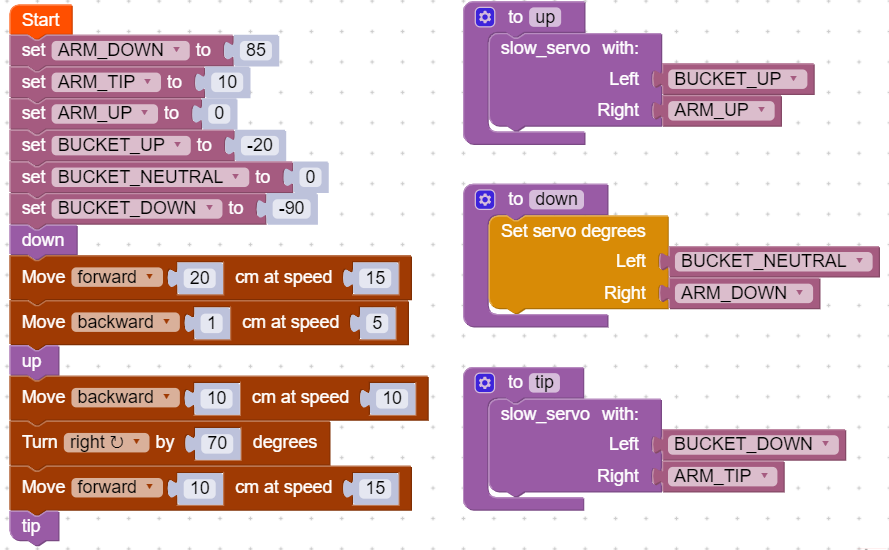
First, we set the constants for the two servos on the digger.
|
||||
|
||||
@@ -79,7 +79,7 @@ The constants we have provided might need to be tweaked for your specific rover.
|
||||
|
||||
**2) Define the Functions:**
|
||||
|
||||
|
||||

|
||||
|
||||
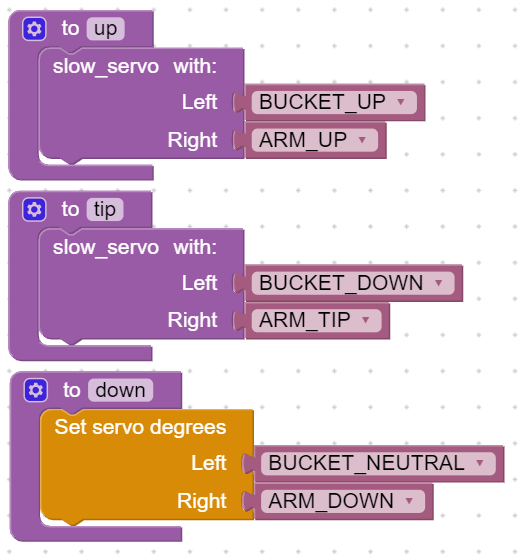
Next, we’ll make some functions to make operating the arm easier. The three functions to be defined are ‘Up’, ‘Tip’, and ‘Down. We define these functions simply to make the code cleaner. Each function is in charge of moving the servos to the correct positions to move the arm up, down, and to tip.
|
||||
|
||||
@@ -87,13 +87,13 @@ It can help to look at section (1) and see the constants are grouped in each of
|
||||
|
||||
#### **3) Prepare the Servos:**
|
||||
|
||||
|
||||

|
||||
|
||||
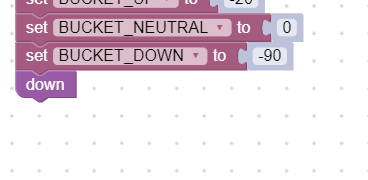
Back in the main code, start by setting the down position on the digger.
|
||||
|
||||
#### **4) Make Your Routine:**
|
||||
|
||||
|
||||

|
||||
|
||||
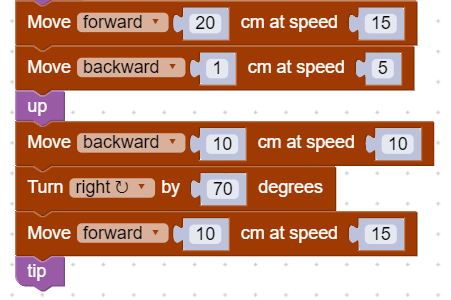
From here, you can choose how your digger operates depending on the layout of the construction site. Make sure to use the functions when making your sequence. The digger in our example acts out the following sequence:
|
||||
|
||||
@@ -115,7 +115,7 @@ From here, you can choose how your digger operates depending on the layout of th
|
||||
|
||||
Note that the ‘slow_servo’ function is not included in this snippet.
|
||||
|
||||
|
||||

|
||||
|
||||
####
|
||||
|
||||
@@ -123,19 +123,19 @@ Note that the ‘slow_servo’ function is not included in this snippet.
|
||||
|
||||
#### 1) Setting the Constants:
|
||||
|
||||
|
||||

|
||||
|
||||
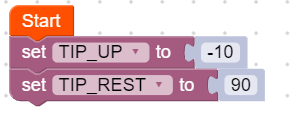
Similar to the digger, we need to set the tipper servo positions. ‘tip_up’ is when the tray is fully tipped, and ‘tip_rest’ is the resting position of the tray.
|
||||
|
||||
#### **2) Prepare the Servos:**
|
||||
|
||||

|
||||

|
||||
|
||||
The servo is set to the rest position.
|
||||
|
||||
#### **3) Make Your Routine:**
|
||||
|
||||
|
||||

|
||||
|
||||
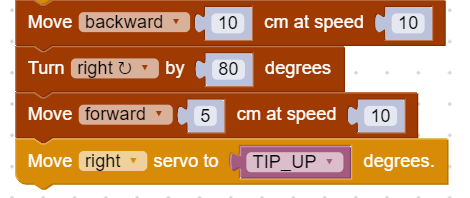
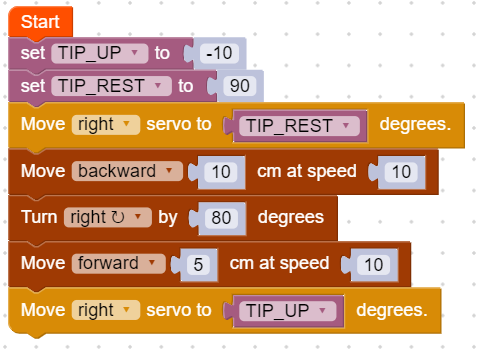
From here, you can choose how your tipper operates depending on the layout of the construction site. The tipper in our example acts out the following sequence after being loaded:
|
||||
|
||||
@@ -149,66 +149,8 @@ From here, you can choose how your tipper operates depending on the layout of th
|
||||
|
||||
#### Complete Code:
|
||||
|
||||
|
||||

|
||||
|
||||
#### Tip:
|
||||
|
||||
Feel free to use the sensors on the robots to make your way around the construction site. Add tape on the ground for line follow and walls for proximity sensing. Additionally, the loads don’t have to be grain-like either. Try using the digger to load up a meloncube.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -17,17 +17,14 @@ To extend the students, task them with designing and printing a modular cube tha
|
||||
|
||||
To download the print file for the Meloncube, head on over to either Printables or Thingiverse:
|
||||
|
||||
[
|
||||
Printables: MelonCube
|
||||
](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
[Printables: MelonCube](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
|
||||
[Thingiverse: MelonCube](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
[
|
||||
Thingiverse: MelonCube
|
||||
](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
### Here’s Our Approach
|
||||
|
||||

|
||||

|
||||
|
||||
#### 1) Move towards the Meloncube
|
||||
|
||||
@@ -35,13 +32,13 @@ Start by moving the rover towards the Meloncube.
|
||||
|
||||
#### **2) Capture the Cube:**
|
||||
|
||||

|
||||

|
||||
|
||||
Next, we will set the continuous servo to turn on in one direction by powering it to 90. The delay will choose how long the servo will spin for. We will set the servo to 0 to turn it off.
|
||||
|
||||
#### **3) Approach the Tower:**
|
||||
|
||||

|
||||

|
||||
|
||||
Once the fork has been lifted, the rover will move towards the tower and stop in front of it. This may vary depending on the distance from the tower.
|
||||
|
||||
@@ -49,74 +46,16 @@ Maybe add tape on the ground for the colour sensor to detect.
|
||||
|
||||
#### 4) Deposit the Cube:
|
||||
|
||||

|
||||

|
||||
|
||||
Once the tower has been reached, the fork should be lowered to the correct height for the tower. A delay of half a second was added to allow for the servo to settle. Finally, the rover will back away from the tower.
|
||||
|
||||
#### Complete Code:
|
||||
|
||||

|
||||

|
||||
|
||||
**Tip:**
|
||||
|
||||
Try and design your own type of modular cubes that are easy to lift and stack. We’ve provided the measurements for the fork to make designing easier. Maybe you can start a construction project like building a city or a staircase!
|
||||
|
||||

|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||

|
||||
|
||||
@@ -11,23 +11,19 @@ Use the Rovers speaker to make it play songs. Learn to combine the world of musi
|
||||
|
||||
In the advanced code, we will make a system to allow us to write our entire song as a string and program the Rover to read the music by itself.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
### Basics of Music:
|
||||
|
||||
When it comes to reading sheet music for this task, we will be using two pieces of information from each note. The tone of the note and how long the note is played. The diagrams for music theory and the example song have been added underneath, but for further information on reading music, head over to ‘Activity: Making Music (Beginner)’.
|
||||
When it comes to reading sheet music for this task, we will be using two pieces of information from each note. The tone of the note and how long the note is played. The diagrams for music theory and the example song have been added underneath, but for further information on reading music, head over to ‘Activity: Making Music (Beginner)’.[Activity: Making Music (Beginner)](/resources/activity-making-music-beginner)
|
||||
|
||||
[
|
||||
Activity: Making Music (Beginner)
|
||||
](/resources/activity-making-music-beginner)
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Code:
|
||||
|
||||
@@ -35,23 +31,15 @@ We will switch to the text code editor for the intermediate and advanced music a
|
||||
|
||||
**Constant -** A constant is a variable that never changes when the code is run. In python, we write this in all capitals with underscores between words.
|
||||
|
||||
**Lists/Arrays - **A list is an object that can contain many variables inside it. Lists can be looped through to access each of the elements. Head to ‘Activity: Making Music (Intermediate)’ to learn more about lists.
|
||||
|
||||
[
|
||||
Activity: Making Music (Intermediate)
|
||||
](/resources/activity-making-music-intermediate)
|
||||
**Lists/Arrays -** A list is an object that can contain many variables inside it. Lists can be looped through to access each of the elements. Head to ‘Activity: Making Music (Intermediate)’ to learn more about lists.[Activity: Making Music (Intermediate)](/resources/activity-making-music-intermediate)
|
||||
|
||||
**Dictionaries -** A dictionary is an object that can access multiple variables like a list. The difference is that dictionaries have ‘keys’ assigned to each value instead of numbered indexes like a list. As seen below, dictionaries are written using curly brackets, with a key and value paired together using a colon. Both the key and value can be anything as long as all keys are unique.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: PYnative*
|
||||
|
||||
Just like accessing list values, enter the key into the square brackets after the dictionary, and it will return the value assigned to that key. For further info on using dictionaries, we recommend visiting the guide to dictionaries by W3Schools:
|
||||
|
||||
[
|
||||
W3Schools: Python Dictionaries
|
||||
](https://www.w3schools.com/python/python_dictionaries.asp)
|
||||
Just like accessing list values, enter the key into the square brackets after the dictionary, and it will return the value assigned to that key. For further info on using dictionaries, we recommend visiting the guide to dictionaries by W3Schools:[W3Schools: Python Dictionaries](https://www.w3schools.com/python/python_dictionaries.asp)
|
||||
|
||||
#### 1) Setting the Constants:
|
||||
|
||||
@@ -189,61 +177,3 @@ for note in output_song:
|
||||
delay(note[1])
|
||||
|
||||
```
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -9,7 +9,7 @@ featuredImage: "/images/resources/activity-making-music-beginner.jpg"
|
||||
|
||||
Use the Rovers speaker to make it play songs. Learn to combine the world of music and robotics by going through sheet music and coding the Rover to play each note.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -19,15 +19,15 @@ When it comes to reading sheet music for this task, we will be using two pieces
|
||||
|
||||
As the image to the right shows, a note can sit on a line or a space. You may find many notes of the same letter (tone) but at a higher pitch (different octave)
|
||||
|
||||

|
||||

|
||||
|
||||
Songs can be divided into a rhythm, the constant beat the music follows. Shown in the diagram to the right, we have the note durations. One whole note (semibreve) lasts for 4 beats. Next, minums last for 2, and crotchets last for 1. We’ll only use semibreves, minums, and crotchets for basic songs.
|
||||
|
||||

|
||||

|
||||
|
||||
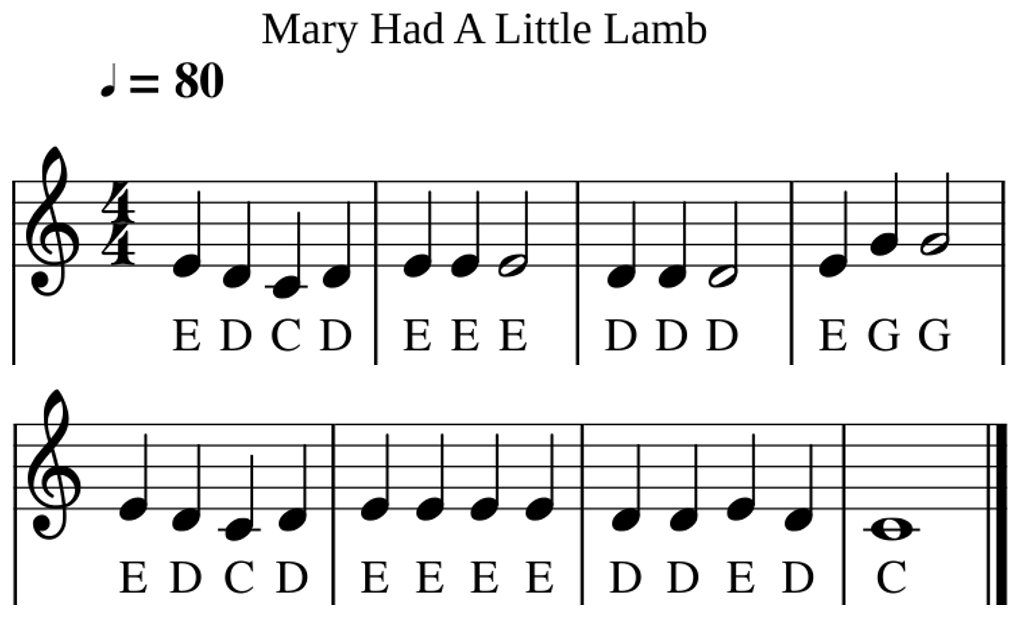
Below is an example of ‘Mary Had a Little Lamb’ in sheet music. The letters have already been written below the notes. This is the example we will use for the guide, but feel free to find your own songs or even write your own music!
|
||||
|
||||

|
||||

|
||||
|
||||
## Code:
|
||||
|
||||
@@ -35,13 +35,13 @@ Below is an example of ‘Mary Had a Little Lamb’ in sheet music. The letters
|
||||
|
||||
#### 1) Setting the Constants:
|
||||
|
||||

|
||||

|
||||
|
||||
Now we need to start setting up the framework in our code to make music. We’ll begin by setting constants for each of the note lengths. A constant is a value used repeatedly throughout the code that never changes, which is perfect for what we need here. As all the notes are multiples of the Crotchet, we can use the diagram above and some simple multiplication to set all the constants. We also need to decide on an octave to use, so make a comment to remember this. For this example, we’ll use octave 4.
|
||||
|
||||
#### 2) Making the Music:
|
||||
|
||||

|
||||

|
||||
|
||||
This part can take a little while, but we will use the ‘Play Note’ and the ‘Delay’ blocks to play each note individually. The ‘Play Note’ block starts playing the note on the Rover, and the ‘Delay’ block controls how long the note is played. We use the constants we made before to control how long we delay. Do this for each note in the song with the correct note lengths.
|
||||
|
||||
@@ -49,74 +49,12 @@ This part can take a little while, but we will use the ‘Play Note’ and the
|
||||
|
||||
We went through and completed part of the example song. Try to finish the rest of the song on your own:
|
||||
|
||||

|
||||

|
||||
|
||||
### Up Next:
|
||||
|
||||
Ready to challenge yourself with faster ways to code music? Head on over to the intermediate or advanced ‘Making Music’ guides!
|
||||
|
||||
[
|
||||
Activity: Making Music (Intermediate)
|
||||
](/resources/activity-making-music-intermediate)
|
||||
[Activity: Making Music (Intermediate)](/resources/activity-making-music-intermediate)
|
||||
|
||||
[
|
||||
Activity: Making Music (Advanced)
|
||||
](/resources/activity-making-music-advanced)
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
[Activity: Making Music (Advanced)](/resources/activity-making-music-advanced)
|
||||
|
||||
@@ -11,23 +11,19 @@ Use the Rovers speaker to make it play songs. Learn to combine the world of musi
|
||||
|
||||
In the intermediate course, we will focus on making the code from the beginner guide more efficient.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
### Basics of Music:
|
||||
|
||||
When it comes to reading sheet music for this task, we will be using two pieces of information from each note. The tone of the note and how long the note is played. The diagrams for music theory and the example song have been added underneath, but for further information on reading music, head over to ‘Activity: Making Music (Beginner)’.
|
||||
When it comes to reading sheet music for this task, we will be using two pieces of information from each note. The tone of the note and how long the note is played. The diagrams for music theory and the example song have been added underneath, but for further information on reading music, head over to ‘Activity: Making Music (Beginner)’.[Activity: Making Music (Beginner)](/resources/activity-making-music-beginner)
|
||||
|
||||
[
|
||||
Activity: Making Music (Beginner)
|
||||
](/resources/activity-making-music-beginner)
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
## Code:
|
||||
|
||||
@@ -37,17 +33,13 @@ We will switch to the text code editor for the intermediate and advanced music a
|
||||
|
||||
**Lists/Arrays -** A list is an object that can contain many variables inside it. Lists can be looped through to access each of the elements.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Srijan kumar Samanta*
|
||||
|
||||
An array or list is an object that can contain multiple variables. As seen above, the image displays a list containing six strings, each representing a colour. You can put any data type in a list, and in python, you can also have data of different types in the same list. Each position in the list has an ‘index’, which is like the address of that position. Indexes start at 0 and can be used to tell the list which element you would like to read.
|
||||
|
||||
To get a complete understanding of lists in python, we recommend checking out the introduction to lists by W3Schools:
|
||||
|
||||
[
|
||||
W3Schools - Python Lists
|
||||
](https://www.w3schools.com/python/python_lists.asp)
|
||||
To get a complete understanding of lists in python, we recommend checking out the introduction to lists by W3Schools:[W3Schools - Python Lists](https://www.w3schools.com/python/python_lists.asp)
|
||||
|
||||
We will first make a ‘note’ list containing two elements, as seen below. Index 0 contains the tone of the note (C on octave 4). Index 1 contains the length of the note. A note is not inherent to python but something we have defined for this activity.
|
||||
|
||||
@@ -73,131 +65,4 @@ SEMIBREVE = 4 * CROTCHET
|
||||
#### 2) Making the Song:
|
||||
|
||||
```
|
||||
song = [
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.C4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.E4, MINUM],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.D4, MINUM],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.G4, CROTCHET],
|
||||
[NOTES.G4, MINUM]
|
||||
]
|
||||
|
||||
```
|
||||
|
||||
This part can take a little while, but the idea is to make a new list called ‘song’ and fill it with lists containing a note and note length. To use a note in the text editor, type ‘NOTES’ in all capitals, followed by the note and the octave number. We’ve done the first line of the song for reference.
|
||||
|
||||
#### 3) Playing the Song:
|
||||
|
||||
```
|
||||
for note in song:
|
||||
Sounds.playNote(note[0])
|
||||
delay(note[1])
|
||||
|
||||
```
|
||||
|
||||
Now to play the music, we can use a loop to cycle through each ‘note’ list in the song. ‘note[0]’ is the first index in the ‘note’ list, which is the tone. ‘note[1]’ is the next index in the ‘note’ list, which is the duration of the note.
|
||||
|
||||
#### Complete Code:
|
||||
|
||||
The complete code here will play the first line of the song. Try and fill in the rest of the song yourself!
|
||||
|
||||
```
|
||||
CROTCHET = 0.5
|
||||
MINUM = 2 * CROTCHET
|
||||
SEMIBREVE = 4 * CROTCHET
|
||||
# Octave 4
|
||||
|
||||
song = [
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.C4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.E4, MINUM],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.D4, CROTCHET],
|
||||
[NOTES.D4, MINUM],
|
||||
[NOTES.E4, CROTCHET],
|
||||
[NOTES.G4, CROTCHET],
|
||||
[NOTES.G4, MINUM]
|
||||
]
|
||||
|
||||
for note in song:
|
||||
Sounds.playNote(note[0])
|
||||
delay(note[1])
|
||||
|
||||
```
|
||||
|
||||
### Up Next:
|
||||
|
||||
Up for a challenge? The advanced course will take you through how to process data through strings. This technique will be more complex but allows you to create songs faster and add more options to your music.
|
||||
|
||||
[
|
||||
Activity: Making Music (Advanced)
|
||||
](/resources/activity-making-music-advanced)
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
song =[[NOTES.E4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.C4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.E4, CROTCHET], [NOTES.E4, CROTCHET], [NOTES.E4, MINUM], [NOTES.D4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.D4, MINUM], [NOTES.E4, CROTCHET], [NOTES.G4, CROTCHET], [NOTES.G4, MINUM] ] ``` This part can take a little while, but the idea is to make a new list called ‘song’ and fill it with lists containing a note and note length. To use a note in the text editor, type ‘NOTES’ in all capitals, followed by the note and the octave number. We’ve done the first line of the song for reference. #### 3) Playing the Song: ``` for note in song: Sounds.playNote(note[0]) delay(note[1]) ``` Now to play the music, we can use a loop to cycle through each ‘note’ list in the song. ‘note[0]’ is the first index in the ‘note’ list, which is the tone. ‘note[1]’ is the next index in the ‘note’ list, which is the duration of the note. #### Complete Code: The complete code here will play the first line of the song. Try and fill in the rest of the song yourself! ``` CROTCHET = 0.5 MINUM = 2 * CROTCHET SEMIBREVE = 4 * CROTCHET # Octave 4 song = [ [NOTES.E4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.C4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.E4, CROTCHET], [NOTES.E4, CROTCHET], [NOTES.E4, MINUM], [NOTES.D4, CROTCHET], [NOTES.D4, CROTCHET], [NOTES.D4, MINUM], [NOTES.E4, CROTCHET], [NOTES.G4, CROTCHET], [NOTES.G4, MINUM] ] for note in song: Sounds.playNote(note[0]) delay(note[1]) ``` ### Up Next: Up for a challenge? The advanced course will take you through how to process data through strings. This technique will be more complex but allows you to create songs faster and add more options to your music. [ Activity: Making Music (Advanced)](/resources/activity-making-music-advanced)
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2023-10-12"
|
||||
categories: ["Activities", "All", "Simulator Activities"]
|
||||
tags: ["Colour Sensors", "Branching", "Iteration", "Algorithm Design", "Advanced"]
|
||||
excerpt: "Use the ping-pong shooter attachment to locate and topple towers from a distance. The ultrasonic sensor can be used to find the tower by searching in a radar motion. Once the tower is located, the distance can be used to move the rover"
|
||||
featuredImage: "/images/resources/activity-pingpong-attachment.jpg"
|
||||
featuredImage: "/images/resources/activity-ping-pong-shooter.jpg"
|
||||
---
|
||||
|
||||
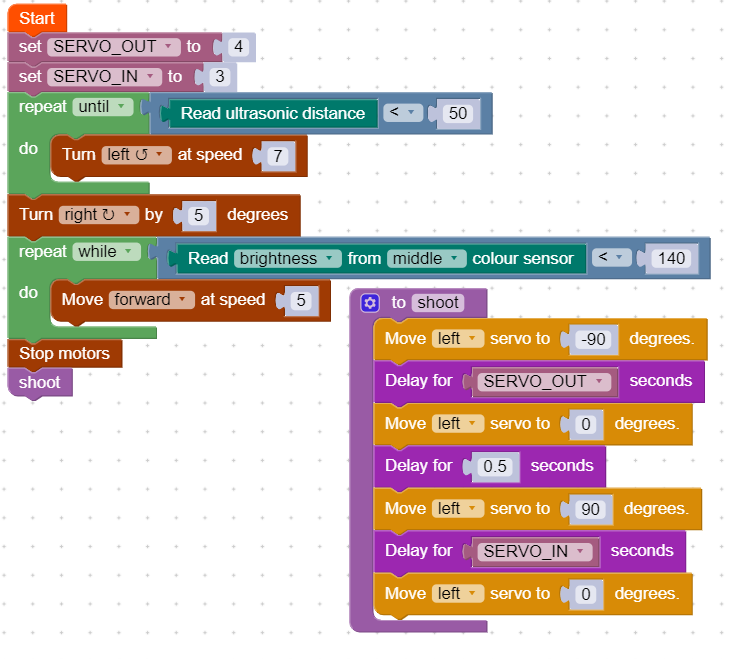
Use the ping-pong shooter attachment to locate and topple towers from a distance. The ultrasonic sensor can be used to find the tower by searching in a radar motion. Once the tower is located, the distance can be used to move the rover close enough to topple the tower.
|
||||
@@ -21,7 +21,7 @@ First, the rover must be placed in a random location near the tower. Then, the r
|
||||
|
||||
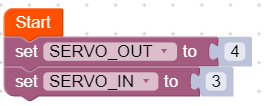
#### 1) Setting the Constants:
|
||||
|
||||
|
||||

|
||||
|
||||
Start by making the ‘servo_out’ and ‘servo_in’ constants. ‘servo_out’ is how long the servo spins to shoot a ball. ‘servo_in’ is how long the servo spins to retract the pusher.
|
||||
|
||||
@@ -29,7 +29,7 @@ The constants we have provided might need to be tweaked for your specific rover.
|
||||
|
||||
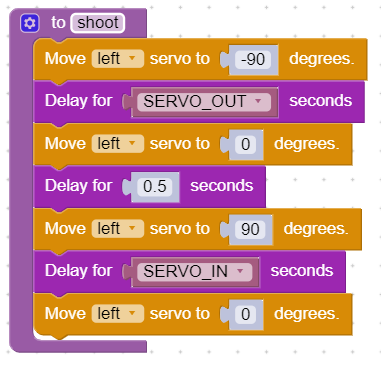
#### **2) The Shoot Function:**
|
||||
|
||||
|
||||

|
||||
|
||||
Continuous servos can spin without limit, similar to a motor. Setting the servo to 90 degrees spins it at top speed in one direction, and -90 degrees turns it the other way. Setting the servo to 0 degrees stops the servo.
|
||||
|
||||
@@ -37,7 +37,7 @@ Here, we set the servo to spin and delay for the constant ‘servo_out’. We st
|
||||
|
||||
#### **3) Ultrasonic Loop:**
|
||||
|
||||

|
||||

|
||||
|
||||
In the main code, the rover spins around until the ultrasonic detects an object within 50cm. Put a ‘Turn Left’ movement block in a while loop that checks the ultrasonic distance. The slower the rover turns, the easier it will be to find the tower, so adjust the speed accordingly.
|
||||
|
||||
@@ -45,7 +45,7 @@ If the rover keeps spinning a bit after seeing the tower, put a ‘Turn Right’
|
||||
|
||||
#### 4) Colour Sensor Loop:
|
||||
|
||||

|
||||

|
||||
|
||||
In this stage, the rover moves forward while the brightness reading from the middle colour sensor is low. For our setup, the ground had a brightness of 100 and the white tape had a brightness of 180. According to these values, when the brightness passes halfway from black to white (140), the loop ends.
|
||||
|
||||
@@ -54,72 +54,14 @@ Make sure to enter your own values for this part.
|
||||
####
|
||||
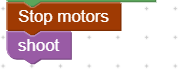
5) Fire!:
|
||||
|
||||
|
||||

|
||||
|
||||
The rover will stop the motors and call the ‘*shoot*’ function to hit the tower. This will pause the robot until the entire shoot sequence is complete.
|
||||
|
||||
#### Complete Code:
|
||||
|
||||
|
||||

|
||||
|
||||
**Tip:**
|
||||
|
||||
Our code aims to get as close as possible to the line and fire. However, another technique is to find the perfect distance from the tower to shoot from and use the ultrasonic to stop the robot.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
@@ -11,15 +11,11 @@ Let’s convert the rover into one of the weirdest musical instruments of all ti
|
||||
|
||||
### Getting Into Music:
|
||||
|
||||

|
||||

|
||||
|
||||
As instruments go, the Theremin is quite an odd machine. The device uses two antennae that have an electromagnetic field surrounding them. These fields can be affected when a hand is moved near them. One antenna (horizontal) is used to control the note's volume, and the other (vertical) is used to control the note's pitch.
|
||||
|
||||
We're going to make the rover behave similarly to the Theremin to play music. For an introduction to reading music and for an example song, head over to the 'Making Music' activity guide
|
||||
|
||||
[
|
||||
Activity: MAking Music (Beginner)
|
||||
](/resources/activity-making-music-beginner)
|
||||
We're going to make the rover behave similarly to the Theremin to play music. For an introduction to reading music and for an example song, head over to the 'Making Music' activity guide[Activity: MAking Music (Beginner)](/resources/activity-making-music-beginner)
|
||||
|
||||
### Setup:
|
||||
|
||||
@@ -27,17 +23,17 @@ So to make our rover theremin, we need two sensors on the rover to act as the tw
|
||||
|
||||
To get started, print this attachment: [Note_Scale.pdf](/s/Note_Scale)
|
||||
|
||||

|
||||

|
||||
|
||||
After printing the page, position the rover so that the right track is precisely on the line for note C. As seen on the page, each note has a number in cm. This indicates how far each line is from the rover IR. We'll be using this information in the code.
|
||||
|
||||

|
||||

|
||||
|
||||
### Code:
|
||||
|
||||
#### 1) Volume Control:
|
||||
|
||||
|
||||

|
||||
|
||||
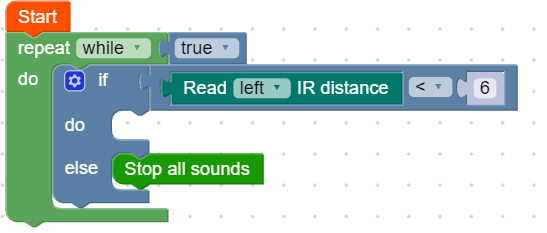
First, we need to code in the volume control. If the left IR is uncovered, all sounds must stop. If the IR is covered, the rover can continue playing the notes.
|
||||
|
||||
@@ -47,66 +43,8 @@ As seen in the code, if the left IR distance sees less than 6cm, the code will c
|
||||
|
||||
Now, all that is left is to add a large 'if/else if 'code to the inside of the volume control to control the pitch. As the code shows, the 'if' statement checks through each distance on the note scale to see which note is being triggered. The code plays the correct note depending on how far the hand is from the right IR.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Tips:
|
||||
|
||||
Try to make your own note scale and change the code to suit it. Maybe you can add two octaves of notes on your page.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2023-10-31"
|
||||
categories: ["Activities", "All", "Simulator Activities"]
|
||||
tags: ["Colour Sensors", "Branching", "Iteration", "Algorithm Design", "Advanced"]
|
||||
excerpt: "Use the seed planter attachment to start your own little garden. Organise your garden layout and have the rover precisely deposit seeds in soft soil. Cover it up as you go, and finish with some water! SetupFor this task, you must purcha"
|
||||
featuredImage: "/images/resources/line-following-h433h-89p7d-capak-lpsxl.jpg"
|
||||
featuredImage: "/images/resources/activity-seed-planter.jpg"
|
||||
---
|
||||
|
||||
Use the seed planter attachment to start your own little garden. Organise your garden layout and have the rover precisely deposit seeds in soft soil. Cover it up as you go, and finish with some water!
|
||||
@@ -25,7 +25,7 @@ Note that the height of the planting cone may need to be adjusted depending on h
|
||||
|
||||
#### 1) Setting the Constants:
|
||||
|
||||

|
||||

|
||||
|
||||
Start by making constant variables to store the up and down positions for the cone servo
|
||||
|
||||
@@ -33,84 +33,26 @@ The constants we have provided might need to be tweaked for your specific rover.
|
||||
|
||||
#### 2) The Plant Function:
|
||||
|
||||

|
||||

|
||||
|
||||
A ‘*plant’* function should also be made to perform the whole act of planting a single cell. First, the cone is moved to the down position. Next, if the count is even, the barrel spins clockwise, otherwise it spins counterclockwise. This is to prevent the seeds from jamming. Then, the barrel is stopped, the cone comes back up, and the rover drives forward to the next cell.
|
||||
|
||||
#### 3) Prepare the Servos:
|
||||
|
||||

|
||||

|
||||
|
||||
Back in the main code, the servos should be initialised to the ‘cone_up’, and off positions. This is to ensure the servos are in the correct positions before starting. Add a 1 second delay to allow the servos to settle.
|
||||
|
||||
#### 4) The Planting Loop:
|
||||
|
||||

|
||||

|
||||
|
||||
Finally, create a loop that will execute several times (20 in this example), corresponding to how many seeds you want to be planted. We will store the amount of times looped in a variable called ‘count’. Inside this loop, run the ‘*plant’* function with and input of ‘count’ This means that the barrel will spin back and forth every time the robot plants a seed.
|
||||
|
||||
#### Complete Code:
|
||||
|
||||

|
||||

|
||||
|
||||
**Tip:**
|
||||
|
||||
Try making your own seed barrel and cone with different-sized holes for your different seeds. That will help you add a bit of variety to your garden!
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
@@ -15,21 +15,21 @@ Use a micro servo to make your own visual gauges. Program the gauge to react to
|
||||
|
||||
[Scale Attachment](/s/gauge.png)
|
||||
|
||||

|
||||

|
||||
|
||||
**2)** Cut out the scale on the outer black line, as shown in the picture below.
|
||||
|
||||

|
||||

|
||||
|
||||
**3)** Position the scale on the front of the servo with the axle at the centre of the scale. Poke through the circles on the scale, and screw in two servo-mounting screws to keep the scale in place.
|
||||
|
||||

|
||||

|
||||
|
||||
**4)** Connect the servo to the left servo port on the rover and turn it on. Calibrate the servo by setting the servo to position -90, and attaching the servo horn pointing to the red portion on the scale.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
### Here’s Our Approach
|
||||
|
||||
@@ -37,13 +37,13 @@ Use a micro servo to make your own visual gauges. Program the gauge to react to
|
||||
|
||||
#### 1) Prepare the Loop:
|
||||
|
||||

|
||||

|
||||
|
||||
Start by setting up a ‘While’ loop that will run forever. The gauge will read the sensor and update itself each time in this loop.
|
||||
|
||||
#### **2) The Scale Function:**
|
||||
|
||||
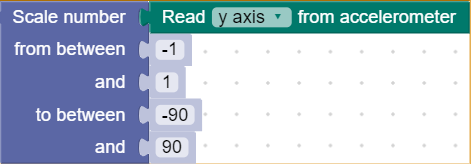
|
||||

|
||||
|
||||
1st row (x) - This is the sensor value that will be scaled
|
||||
|
||||
@@ -57,7 +57,7 @@ Start by setting up a ‘While’ loop that will run forever. The gauge will rea
|
||||
|
||||
From the math section, grab the ‘Scale Number’ block. The purpose of this block is to take an input (like a sensor reading) and scale it to suit an output (like servo movements). This block works similarly to the diagram below. Here are the inputs for the block:
|
||||
|
||||

|
||||

|
||||
|
||||
*Example of the scale function from [0, 1023] to [0, 4]*
|
||||
|
||||
@@ -67,66 +67,8 @@ For this activity, we will use the y-axis of the accelerometer as our sensor. Th
|
||||
|
||||
Finally, place a ‘Move Servo’ block into the loop and put the scale function inside. Run the code and tilt the robot on its side. The gauge should move the hand the more you tilt the rover.
|
||||
|
||||
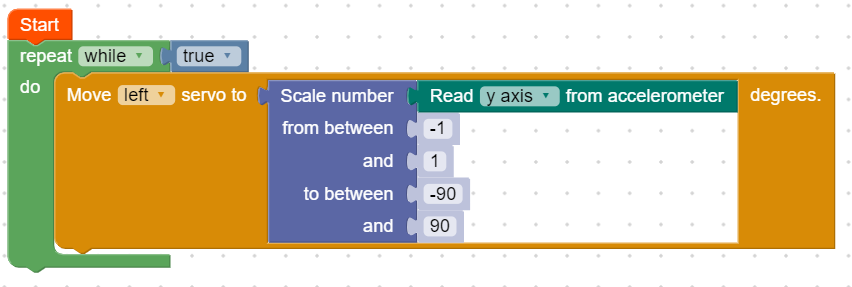
|
||||

|
||||
|
||||
**Tip:**
|
||||
|
||||
Try changing some of the colours on the scale and adding numbers to it. Maybe connect it to other sensors like the Ultrasonic, and use the gauge to display how close an object is to the rover.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn iteration, algorithm design, maths, and how to use the Rover’s
|
||||
featuredImage: "/images/resources/balance-bot.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Challenge students to program their rover to always try and stabilise itself. When complete, the rover will always turn and drive upwards on any tilted surface. Once the surface the robot is driving on is flat, it should stop moving. This means the robot will balance on a seesaw. Students will need to use data from the accelerometer to control the motors based on the orientation of the rover.
|
||||
|
||||
@@ -61,7 +60,7 @@ Activity Demonstration
|
||||
|
||||
### Setup
|
||||
|
||||

|
||||

|
||||
|
||||
We use a large hard cover book for this challenge as a platform. Any flat surface that can be moved and tilted will work. When the object is tilted the rover should move up the surface in an attempt to stabilize. When the surface is flat the rover has found balance and will not move.
|
||||
|
||||
@@ -69,7 +68,7 @@ For this exercise you can also use a seesaw style balance board or a circular wo
|
||||
|
||||
### Here’s Our Approach
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code (single axis balancing)
|
||||
|
||||
@@ -83,66 +82,8 @@ To make the rover move smoothly and make fine adjustments, we can use the scale
|
||||
|
||||
#### **Stage 3**
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code (multi-axis balancing)
|
||||
|
||||
To make the program also work for a circular board we need to also take into account the Y axis of the accelerometer. We can use the same scale number block to create a variable called rotation, which we can include in our motor block. Since our speed variable determines the speed the motors move forward or back, the rotation modifier needs a + or - sign. We need this sign because the robot rotates by making its tracks move in opposite directions.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -15,13 +15,13 @@ After around 10 weeks of learning, designing and practicing they were ready for
|
||||
|
||||
To kick off the program and get the students started, Adam and Tim from Micromelon visited the school with their own creations. Micromelon provided base files for all designs including toothpick holders, balloon & ping pong ball holders, and some motor mounts on top of the base shell with mounting holes for all attachments. In this session students drove the robots around the desk in remote control mode, trying to pop each others balloons.
|
||||
|
||||

|
||||

|
||||
|
||||
As the term went on students designs got more and more elaborate, including spray painting and extra skewers to pop balloons from all angles!
|
||||
|
||||
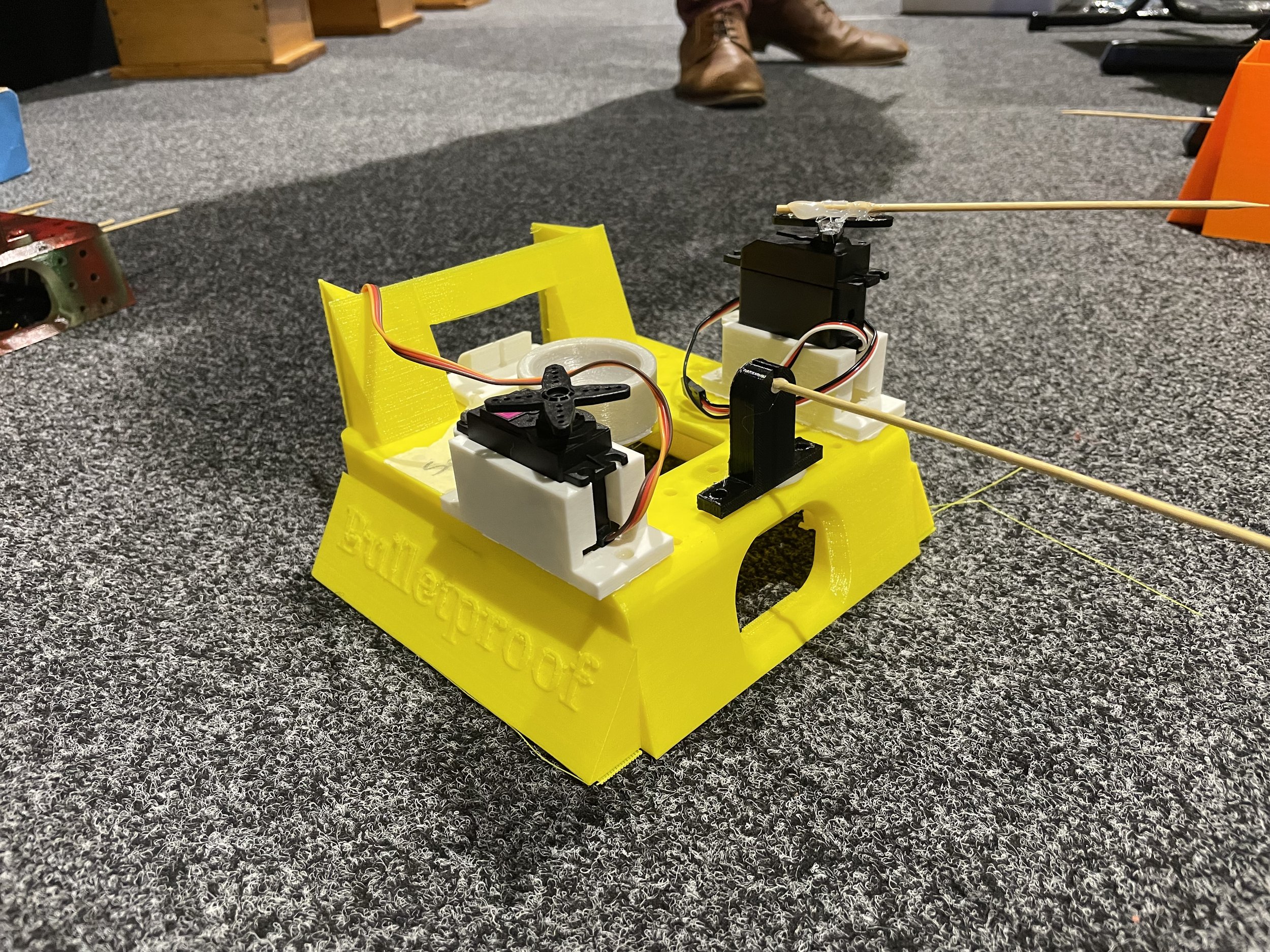
|
||||

|
||||
|
||||
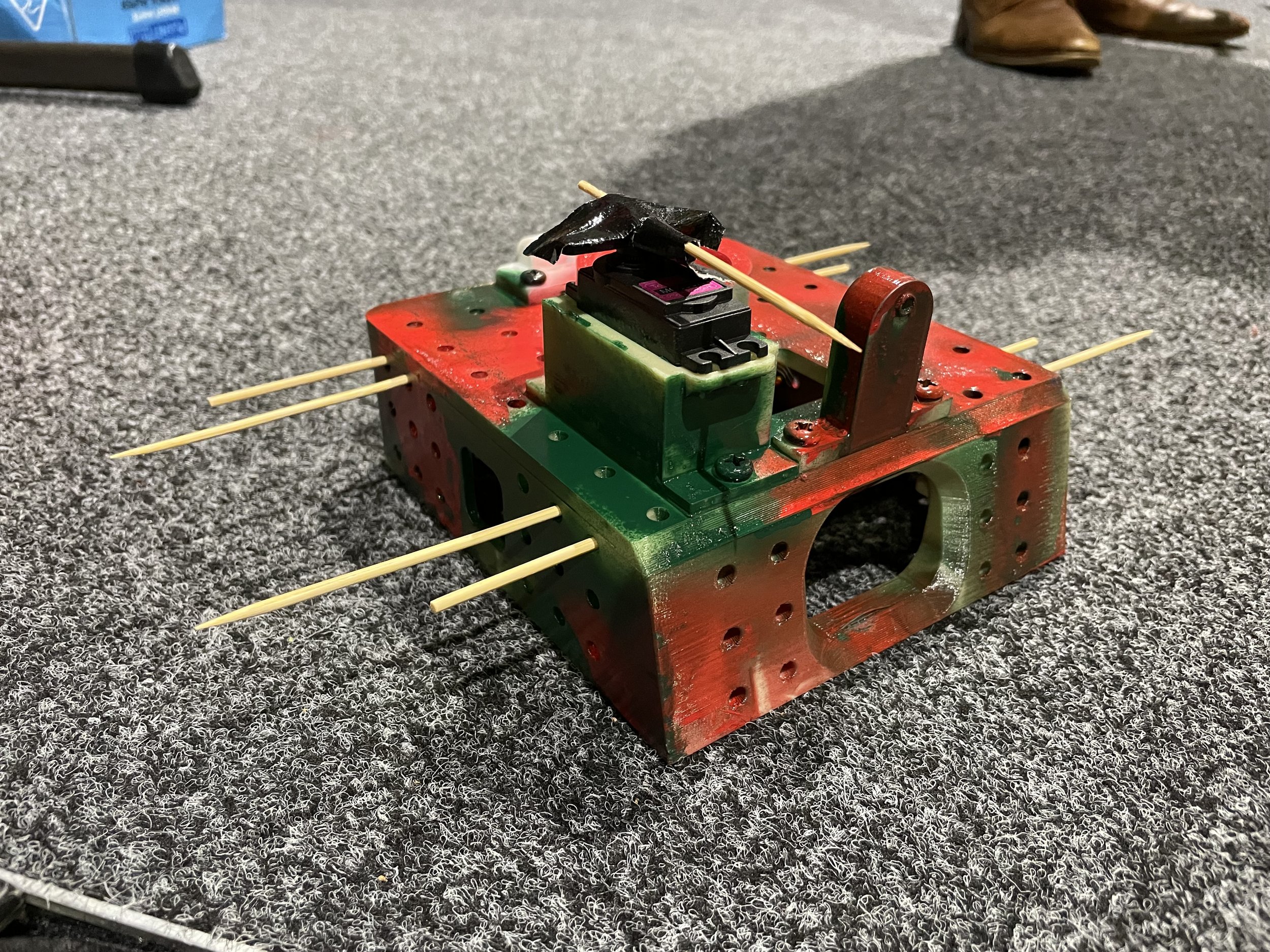
|
||||

|
||||
|
||||
For the final event there were over 10 teams competing, including a few from different teachers around the school. The rules for the competition were fairly simple with points awarded for each accomplishment.
|
||||
|
||||
@@ -31,9 +31,9 @@ Rounds were timed and ended at 2.5 minutes or when one challenger is defeated (b
|
||||
|
||||
1 point - Popping opponents balloon
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Want to run this program at your school? Get in contact and we’ll help!
|
||||
|
||||
|
||||
@@ -11,13 +11,13 @@ featuredImage: "/images/resources/binary-bot.png"
|
||||
|
||||
Complete the Driving Shapes exercise but using only binary numbers instead of decimal numbers. If you’re unfamiliar with Driving Shapes, all you need to do is program your rover to move in a shape e.g. square or triangle.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
### Setup
|
||||
|
||||

|
||||

|
||||
|
||||
#### Learning Binary
|
||||
|
||||
@@ -41,68 +41,10 @@ For this solution we repeated the while loop forever so we keep getting a square
|
||||
|
||||
Sometimes you’ll need to adjust your angles since the rovers will turn different amounts depending on the surface they are on. See if you can find a really accurate solution with your rover and on the floor in the classroom.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,66 +7,61 @@ excerpt: "What You’ll Need: Click on the buttons below to collect the print fi
|
||||
featuredImage: "/images/resources/build-guide-bulldozer.png"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||

|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6955418)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6955418)
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/1199183-micromelon-bulldozer-attachment)
|
||||
[Printables](https://www.printables.com/model/1199183-micromelon-bulldozer-attachment)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/1129214#profileId-1129115)
|
||||
[Makerworld](https://makerworld.com/en/models/1129214#profileId-1129115)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 6:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
@@ -1,69 +1,64 @@
|
||||
---
|
||||
title: "Build Guide: Claw"
|
||||
date: "2022-07-26"
|
||||
categories: ["Guides", "Build Guides"]
|
||||
categories: ["Build Guides"]
|
||||
tags: ["Build Guide", "3D Printing"]
|
||||
excerpt: "What You’ll Need: Click the buttons below to collect the print files! Printables Thingiverse Makerworld #b"
|
||||
featuredImage: "/images/resources/build-guide-claw.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||
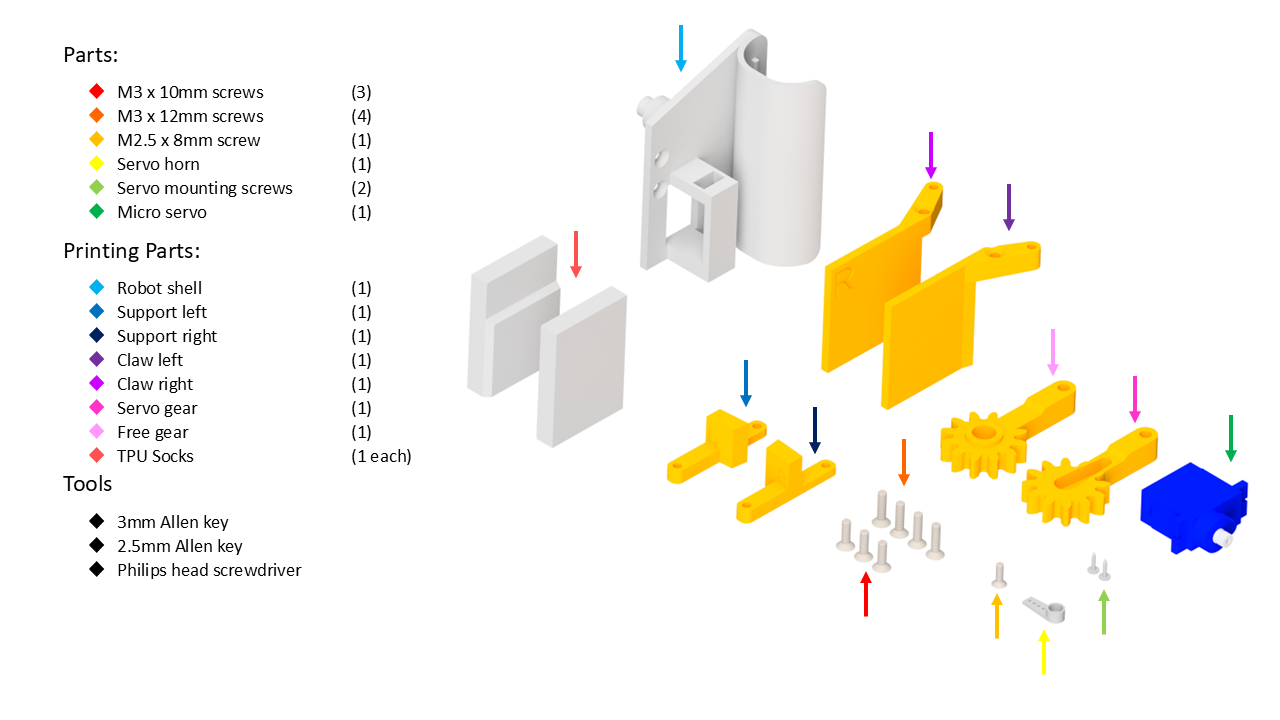
|
||||

|
||||
|
||||
Click the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/639391-micromelon-claw-attachment)
|
||||
[Printables](https://www.printables.com/model/639391-micromelon-claw-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6284251)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6284251)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147783#profileId-641414)
|
||||
[Makerworld](https://makerworld.com/en/models/147783#profileId-641414)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||
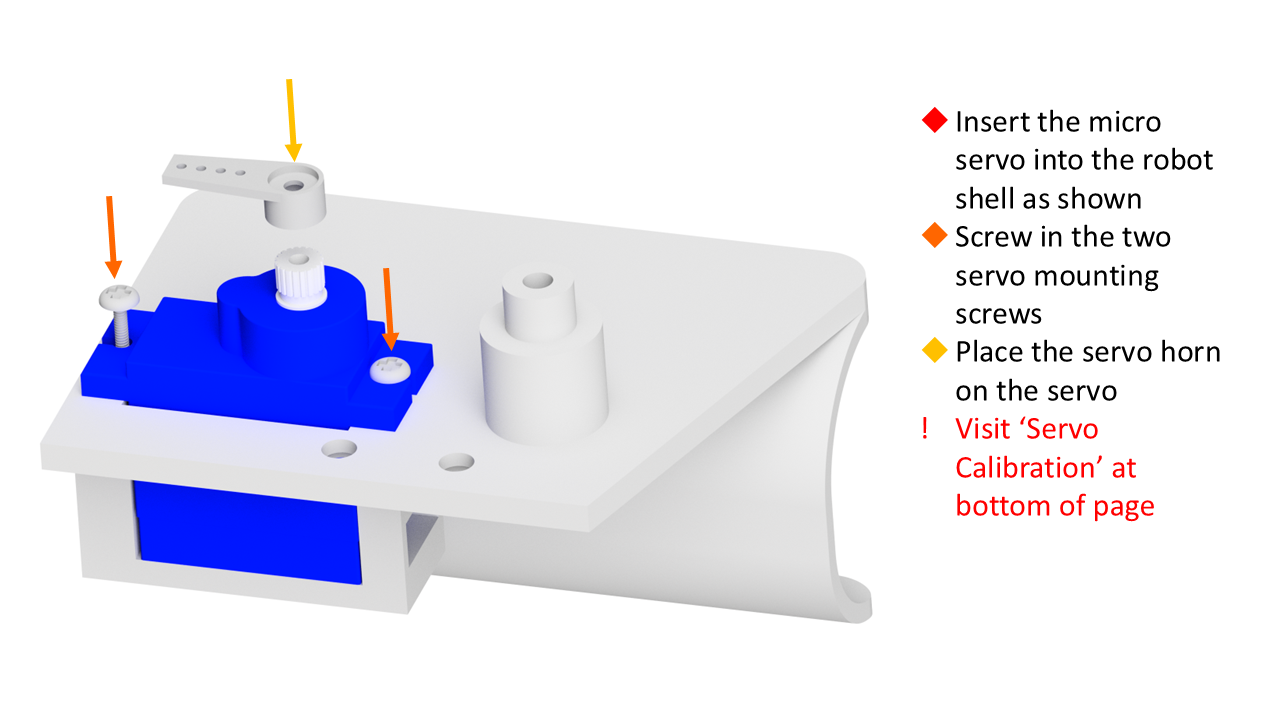
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||
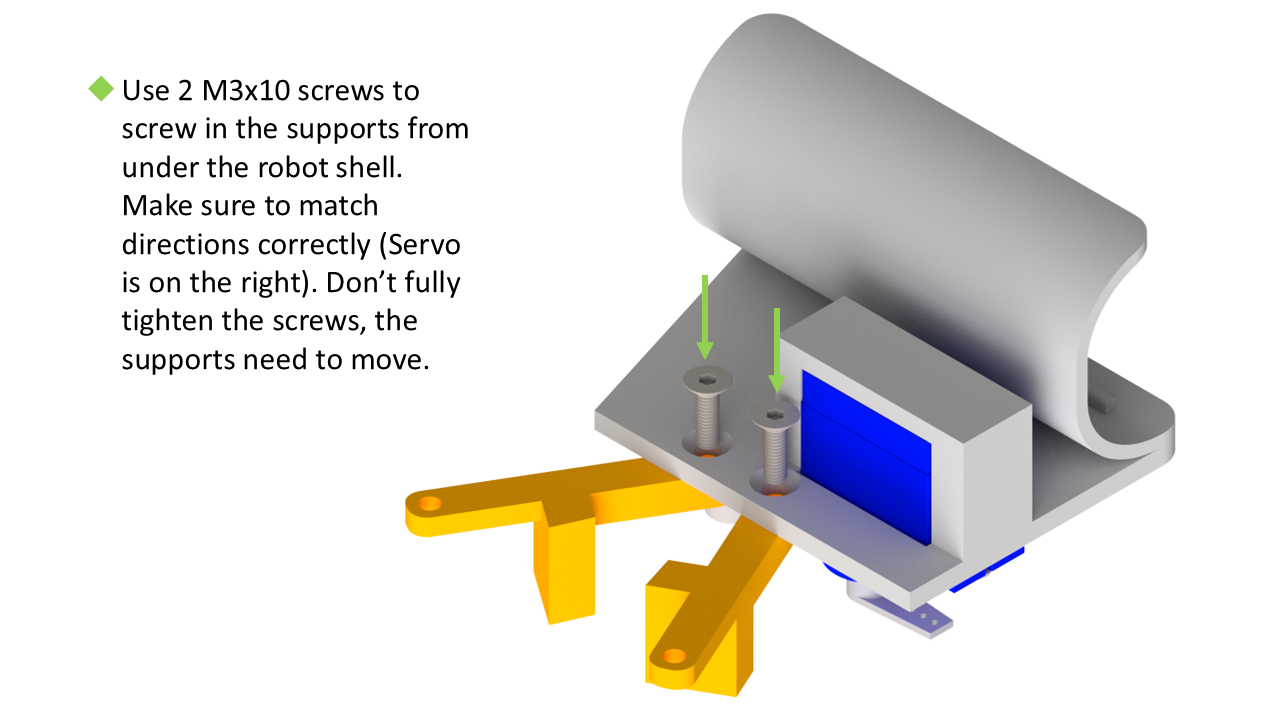
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||
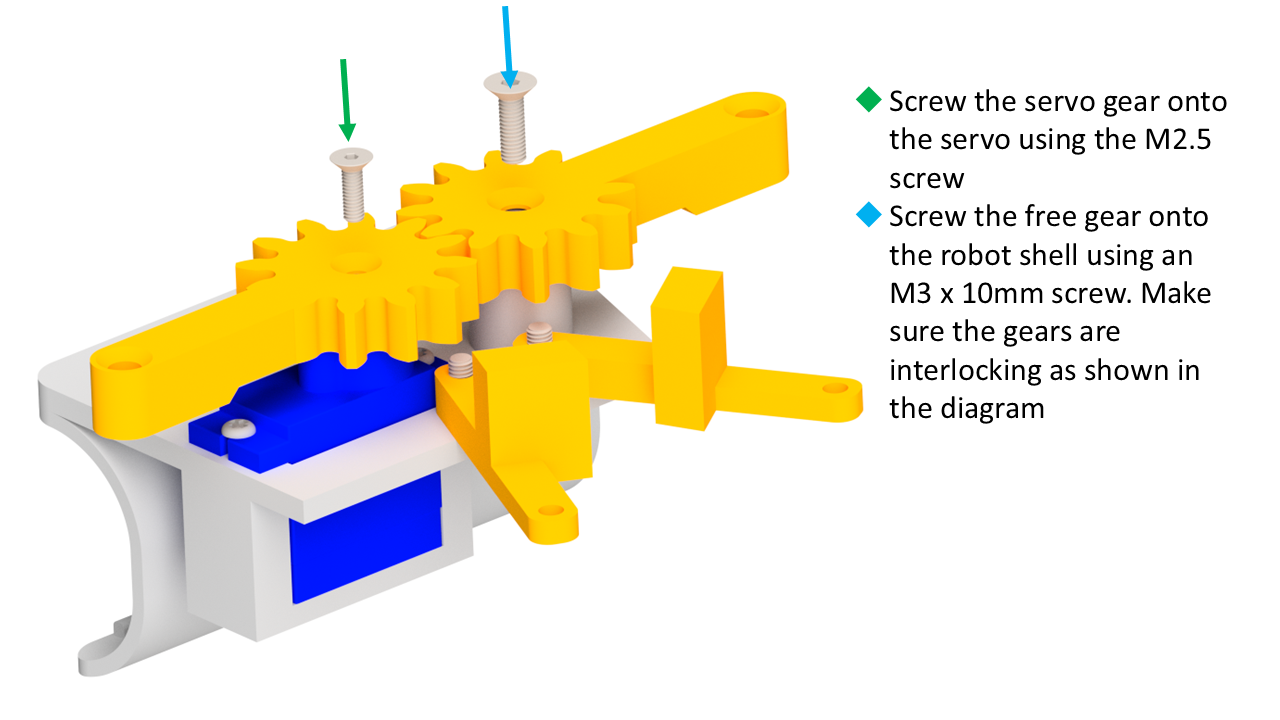
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||
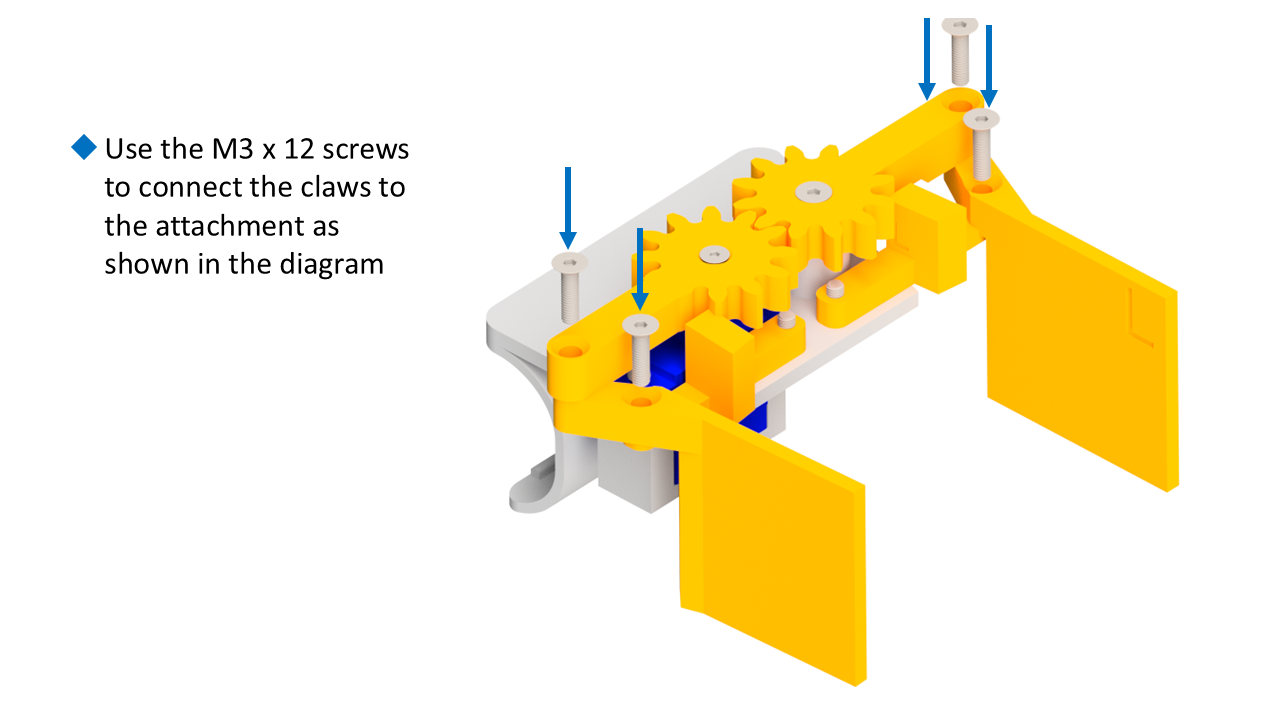
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||
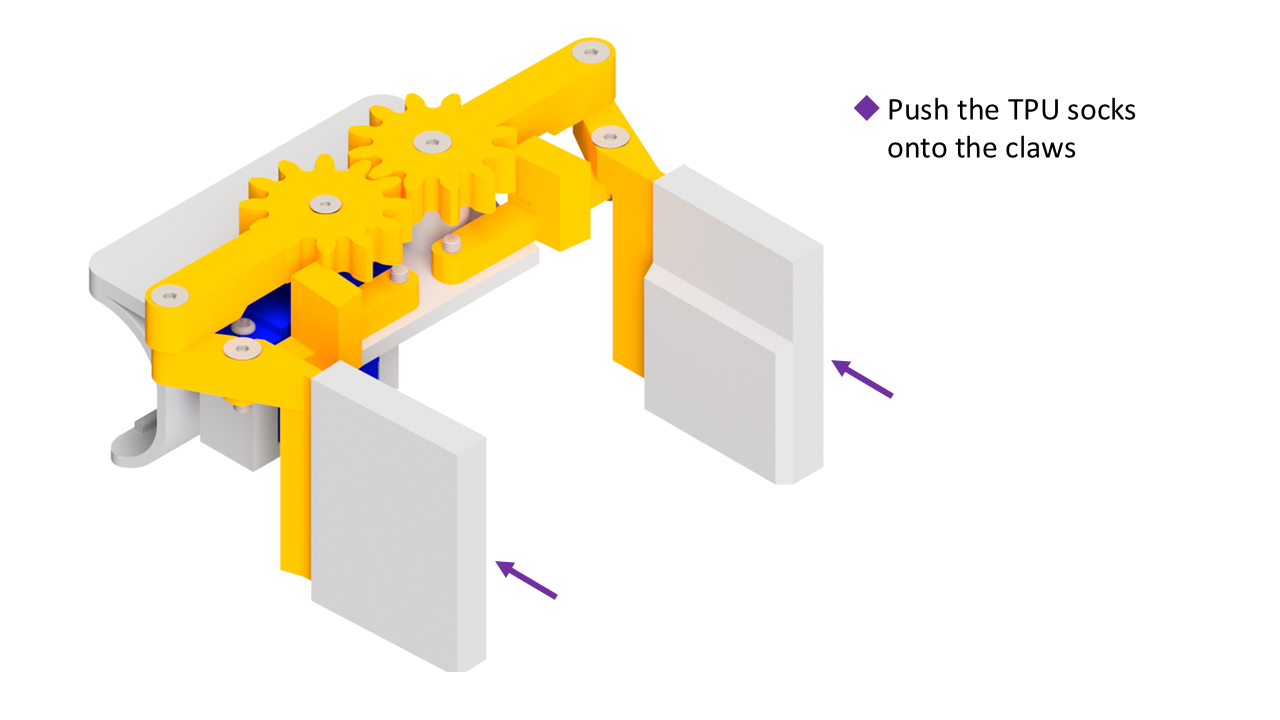
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Servo Calibration:
|
||||
|
||||
@@ -73,28 +68,22 @@ Before attaching a servo horn to a servo, we need to make sure that the servo mo
|
||||
|
||||
#### Step 1:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 1 is completed, plug the servo into the right port and run the following code:
|
||||
|
||||

|
||||

|
||||
|
||||
Once the code has been uploaded, without rotating the servo, re-attach the servo horn, so when the servo is at 0, the servo horn is in the same orientation as the image.
|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Claw attachment, head on over to our claw attachment activity to get started! For a bonus print, grab our Meloncube from Printables or Thingiverse to help with your activity.
|
||||
|
||||
[
|
||||
Activity: Claw Attachment
|
||||
](/resources/activity-claw-attachment)
|
||||
[Activity: Claw Attachment](/resources/activity-claw-attachment)
|
||||
|
||||
[
|
||||
Printables: MelonCube
|
||||
](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
[Printables: MelonCube](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
|
||||
[
|
||||
Thingiverse: MelonCube
|
||||
](https://www.thingiverse.com/thing:6284246)
|
||||
[Thingiverse: MelonCube](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
@@ -7,63 +7,58 @@ excerpt: "What You’ll Need: Click on the buttons below to collect the print fi
|
||||
featuredImage: "/images/resources/build-guide-digger.jpg"
|
||||
---
|
||||
|
||||
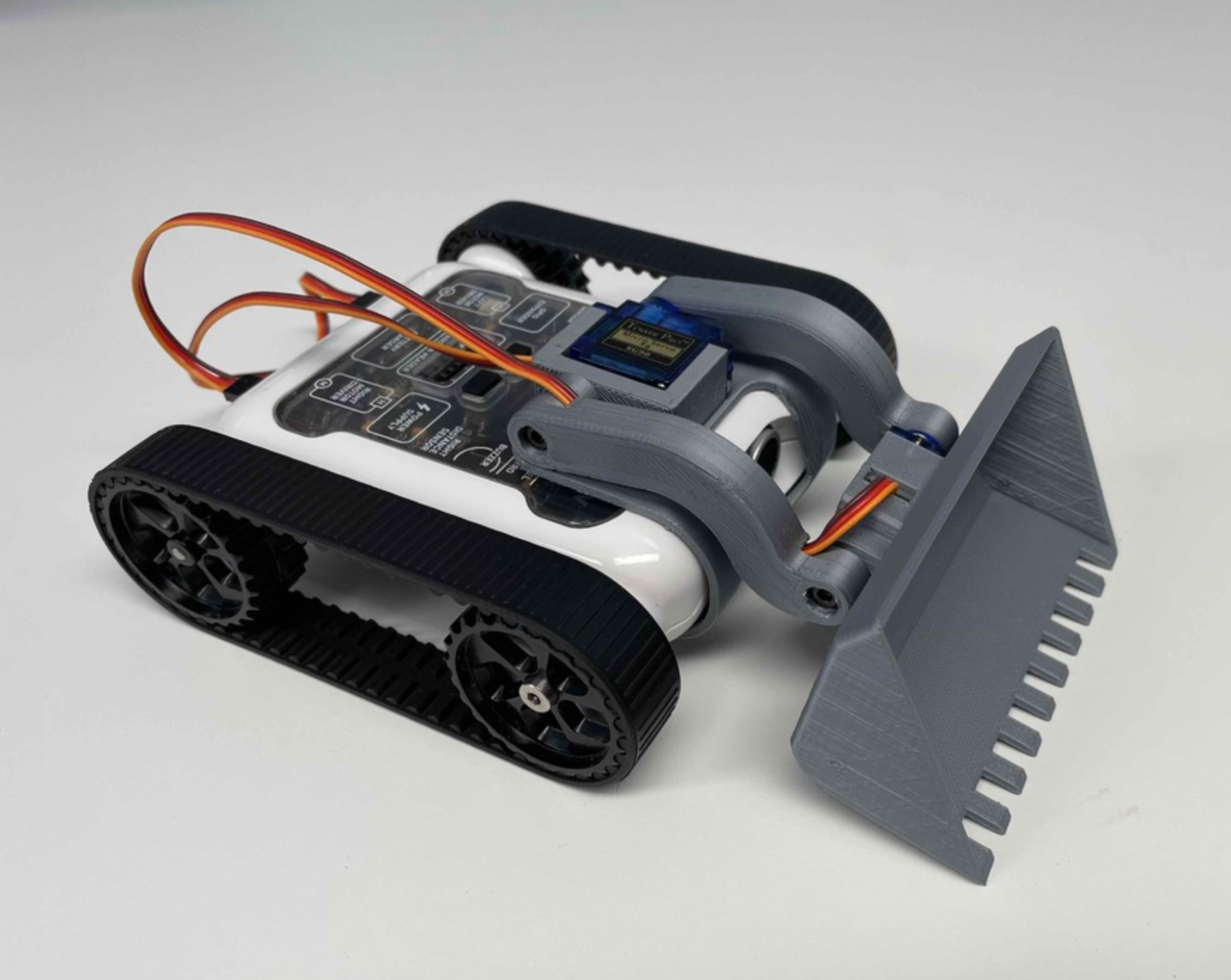
|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||

|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/252745-micromelon-digger-attachment/comments)
|
||||
[Printables](https://www.printables.com/model/252745-micromelon-digger-attachment/comments)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:5240349)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:5240349)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147792#profileId-575290)
|
||||
[Makerworld](https://makerworld.com/en/models/147792#profileId-575290)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||
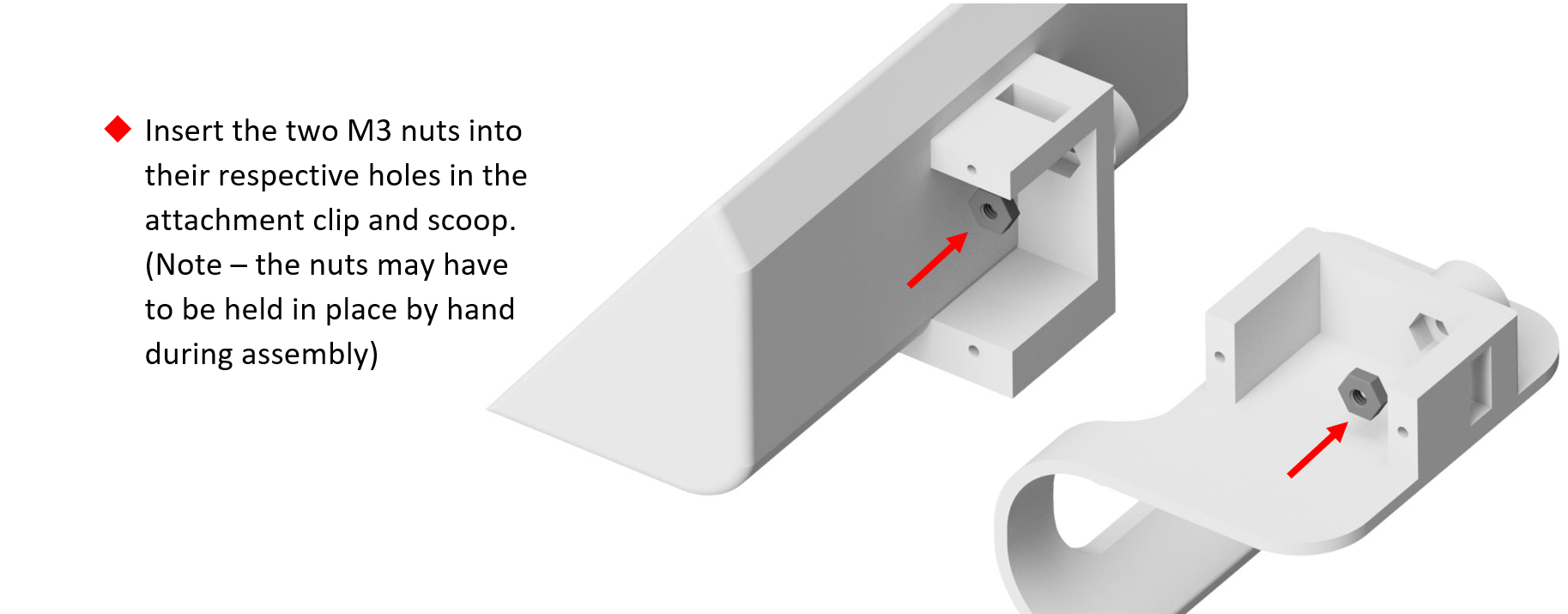
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||
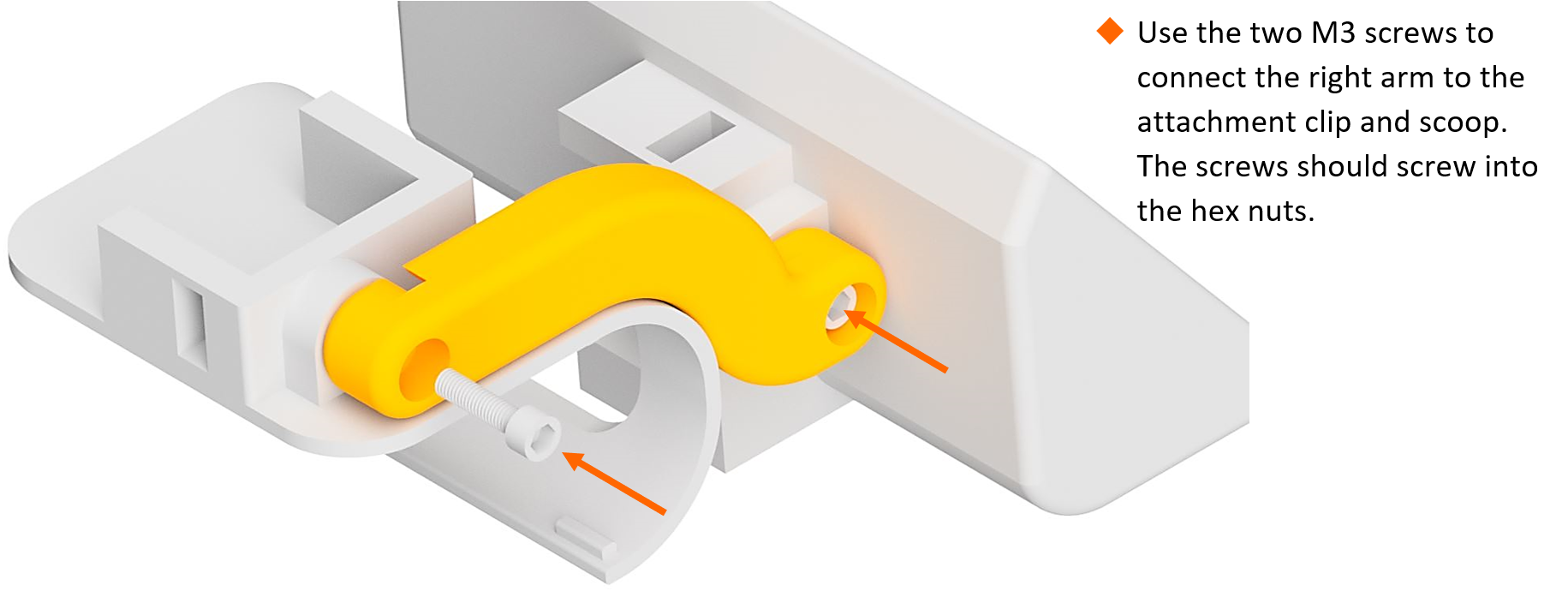
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||
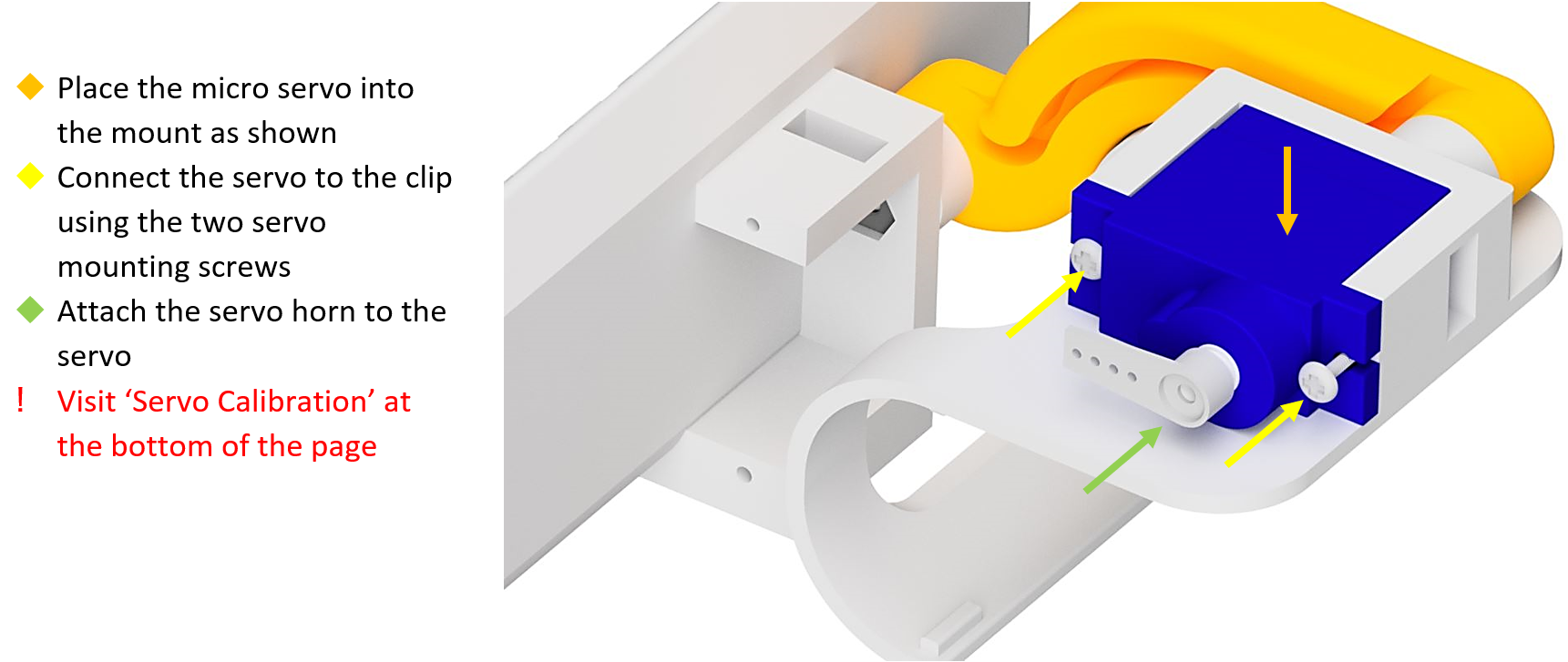
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||
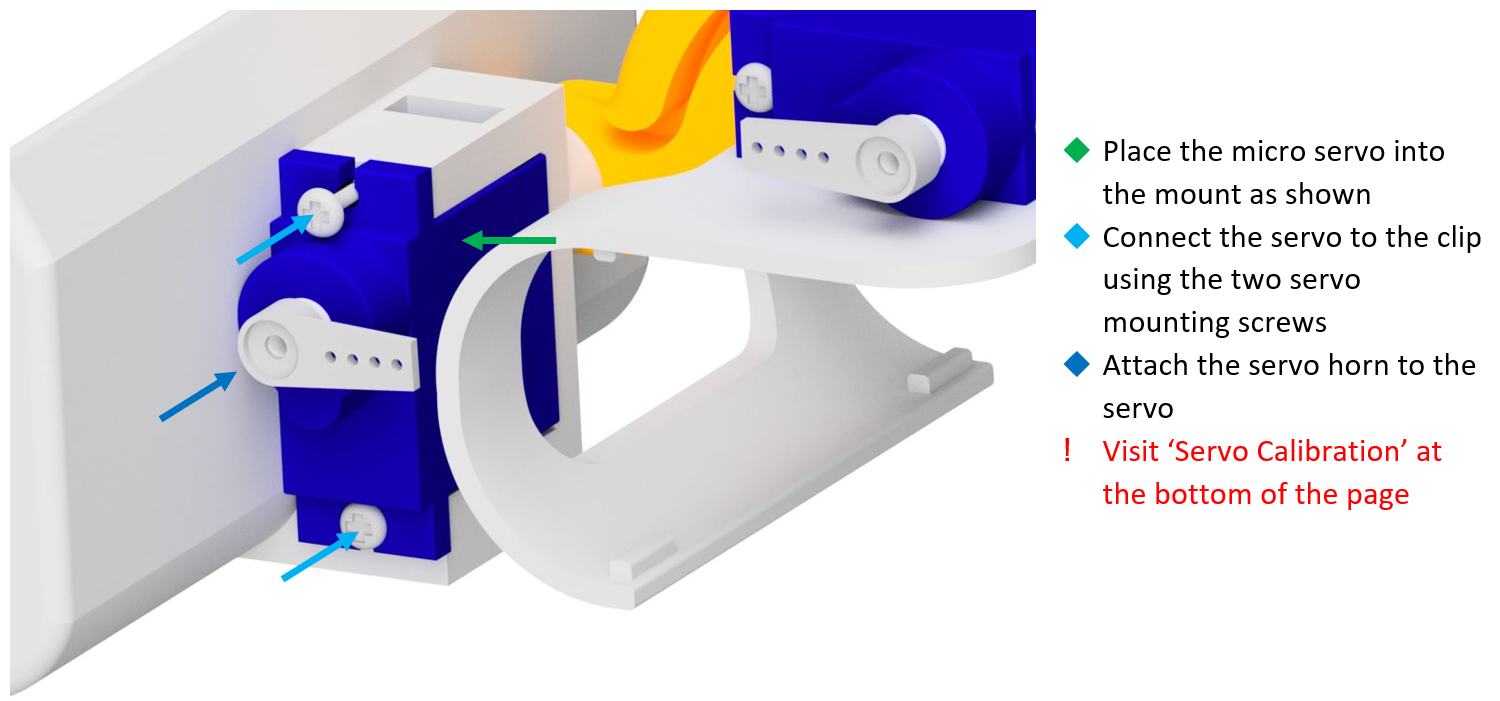
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Servo Calibration:
|
||||
|
||||
@@ -73,11 +68,11 @@ Before attaching a servo horn to a servo, we need to make sure that the servo mo
|
||||
|
||||
#### Step 3:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 3 is completed, plug the servo into the right port and run the following code:
|
||||
|
||||
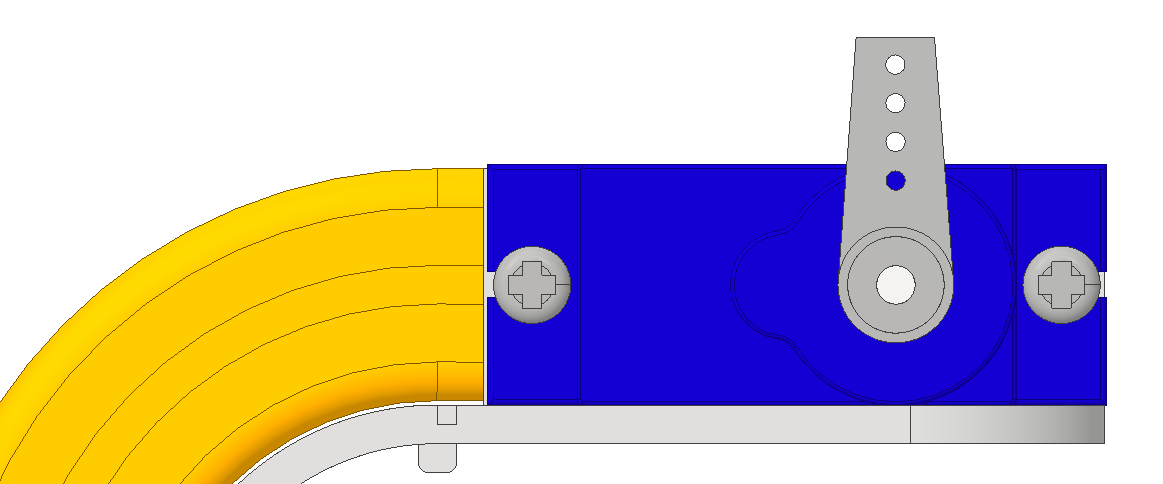
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||
@@ -85,20 +80,16 @@ Upload the code and attach the servo horn to the servo so it’s in this positio
|
||||
|
||||
#### Step 4:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 4 is completed, plug the servo into the left port and run the following code:
|
||||
|
||||
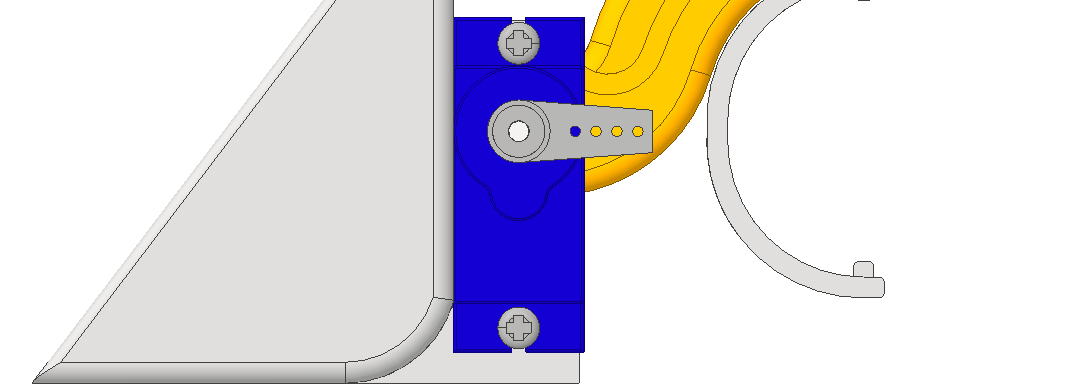
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Digger attachment, head on over to our Digger and Tipper activity to get started!
|
||||
|
||||
[
|
||||
Activity: Digger and Tipper
|
||||
](/resources/activity-digger-and-tipper-attachment)
|
||||
With your fully built Micromelon Digger attachment, head on over to our Digger and Tipper activity to get started
|
||||
|
||||
@@ -7,82 +7,69 @@ excerpt: "What You’ll Need:In the print files for the fork and screw, note tha
|
||||
featuredImage: "/images/resources/build-guide-forklift.png"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||
In the print files for the fork and screw, note that there are different speed grades. The slower the speed, the stronger it is. When downloading files, choose your speed, and make sure to print out a fork and a screw of the same speed. A fork and screw of different speeds will not work together!
|
||||
|
||||
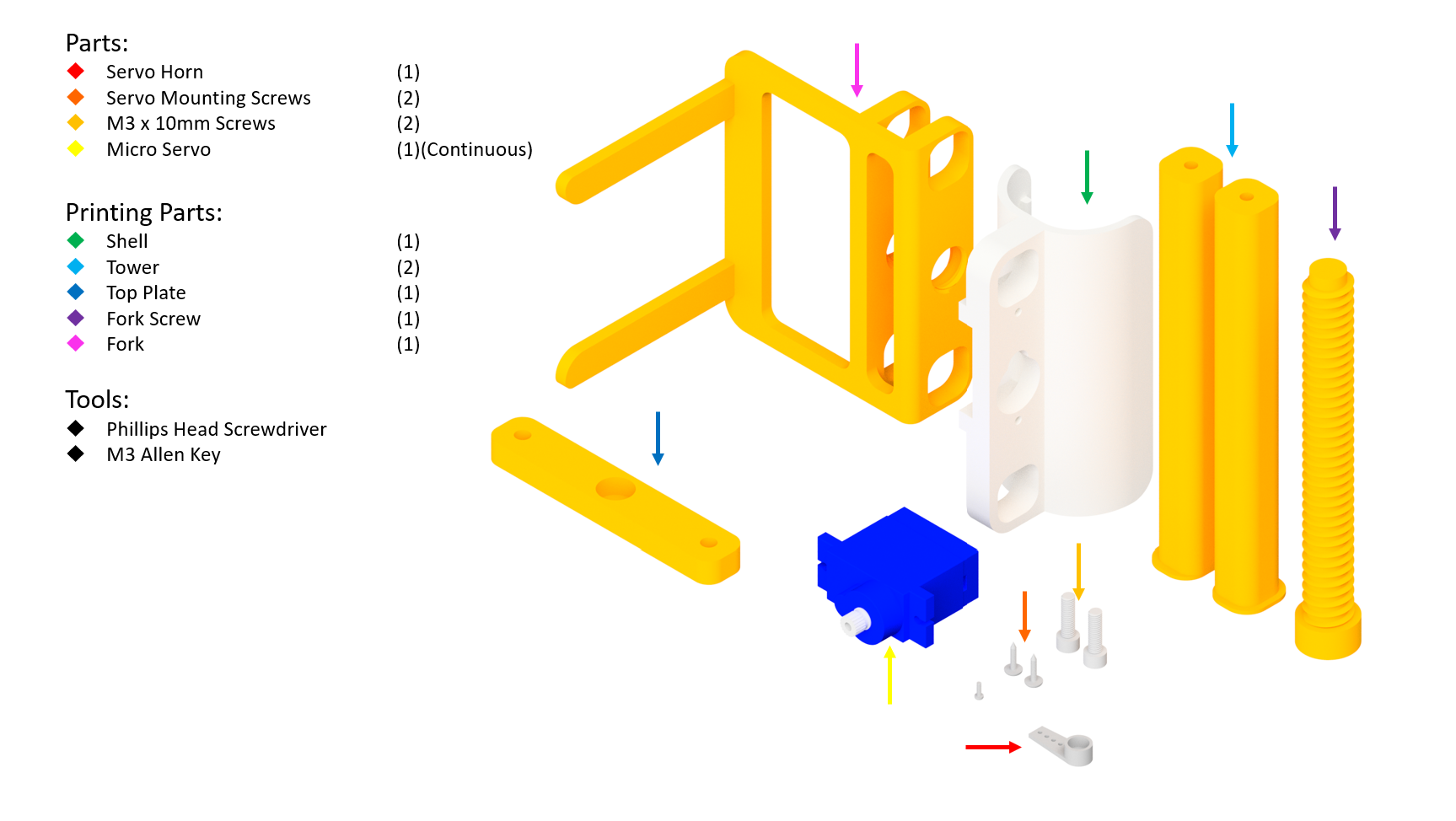
|
||||

|
||||
|
||||
Click on the a button below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/639392-micromelon-forklift-attachment)
|
||||
[Printables](https://www.printables.com/model/639392-micromelon-forklift-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6284242)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6284242)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147782?from=search)
|
||||
[Makerworld](https://makerworld.com/en/models/147782?from=search)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||
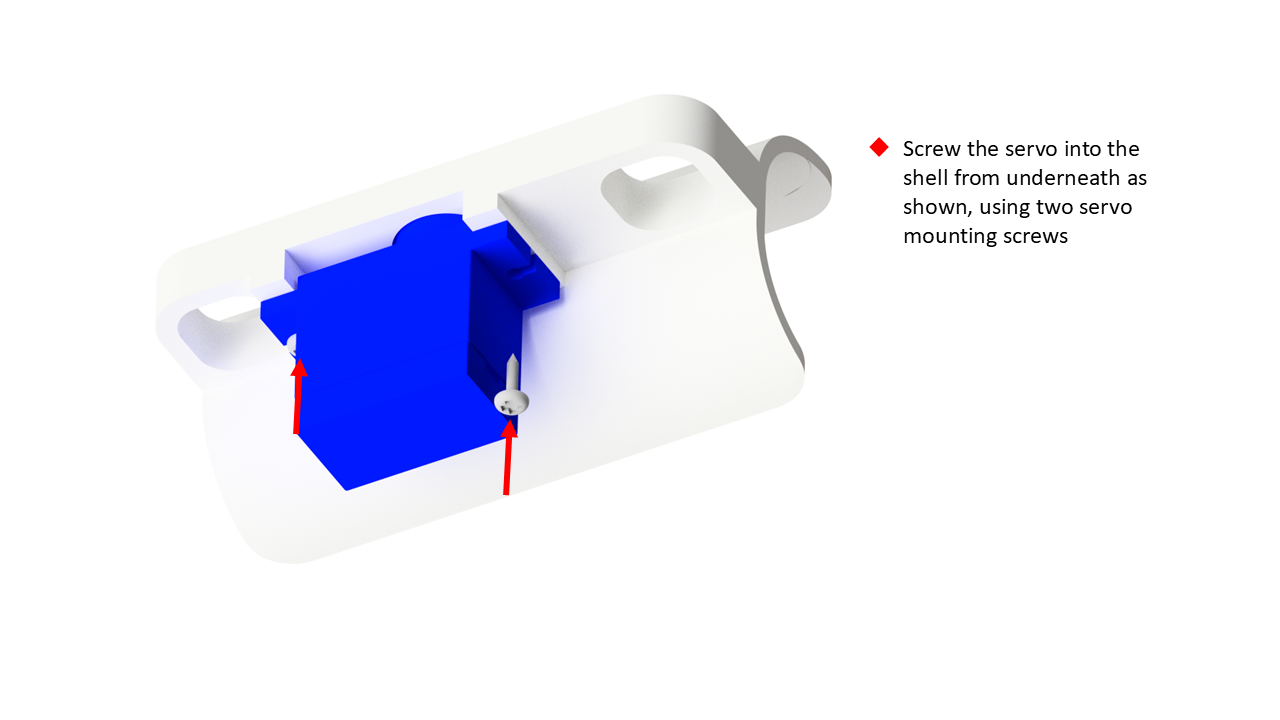
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||
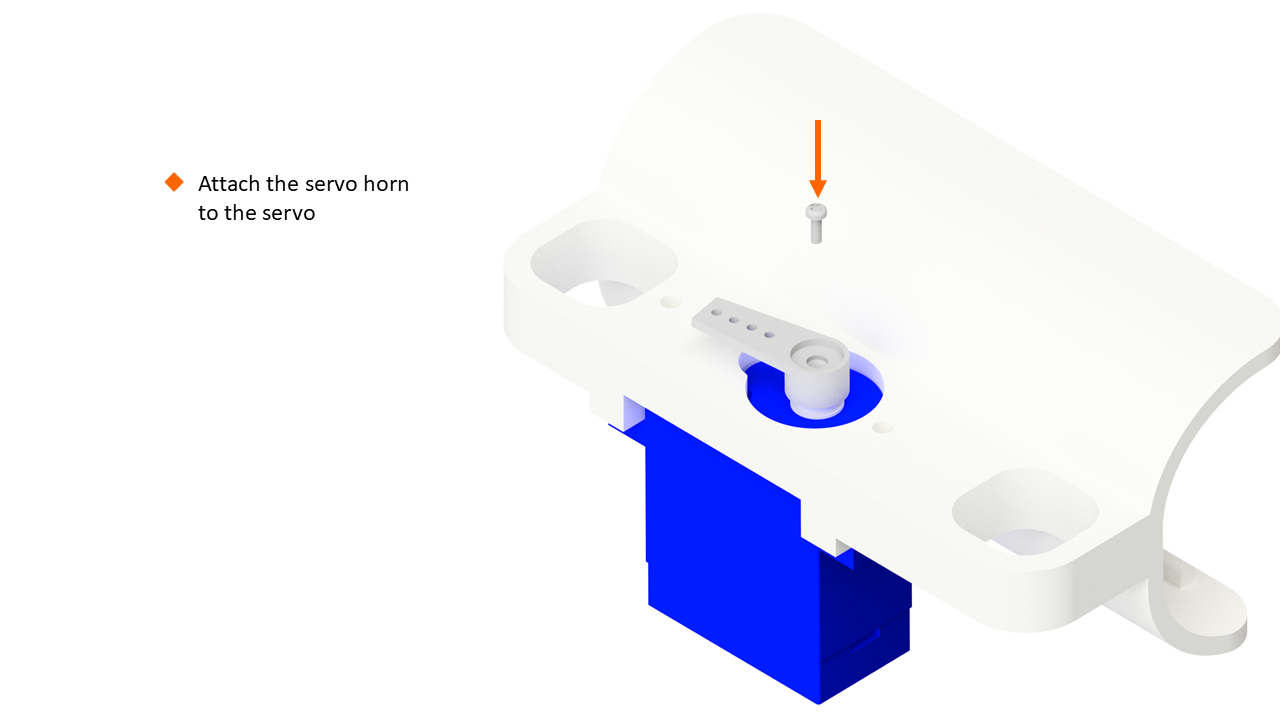
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||
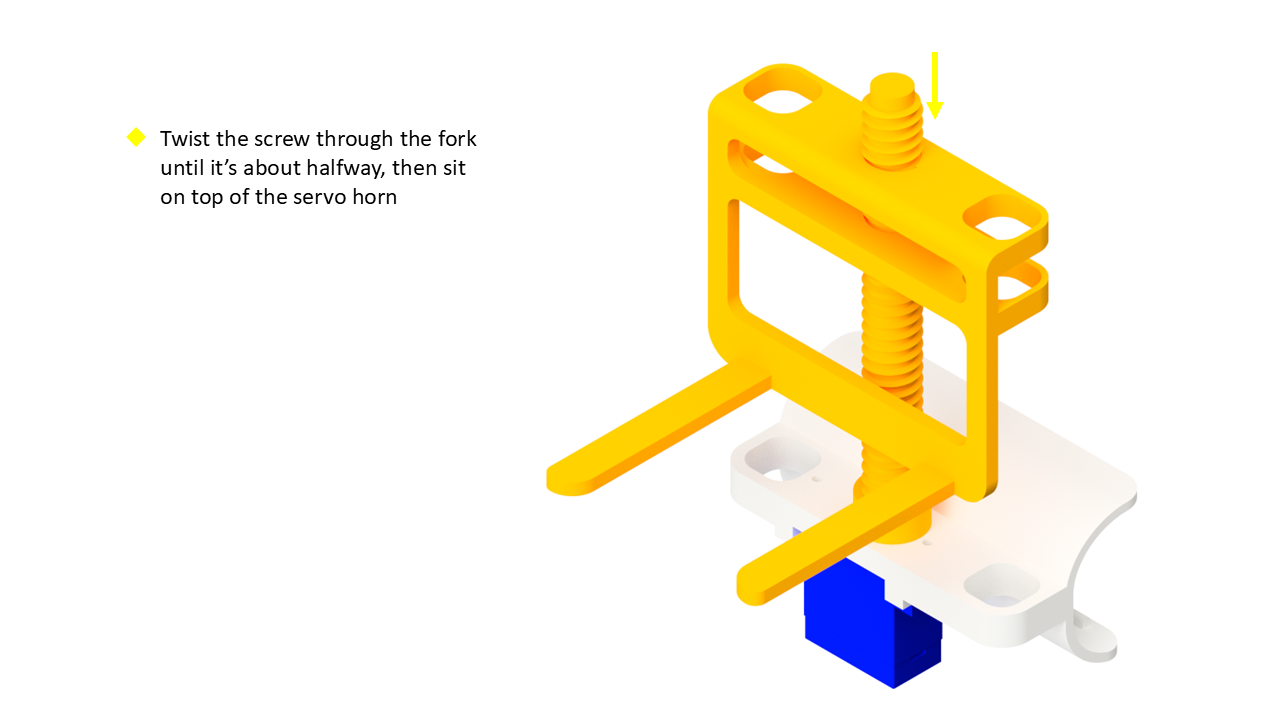
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||
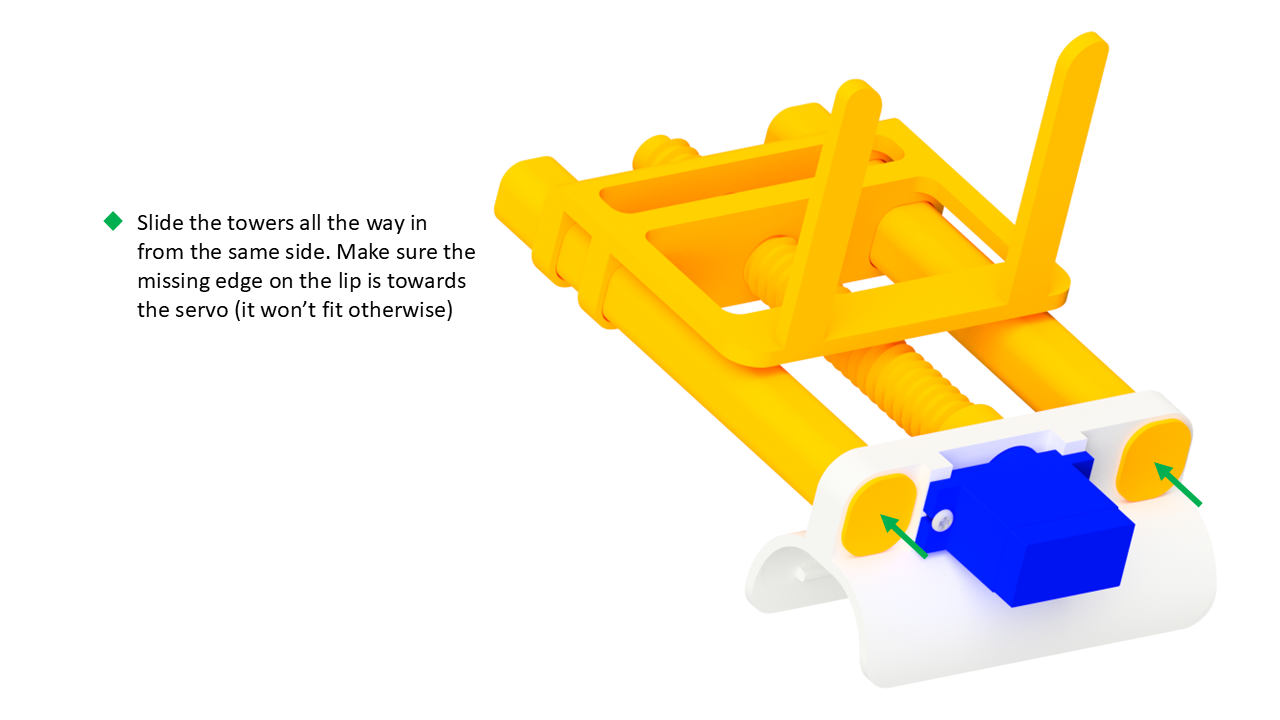
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||
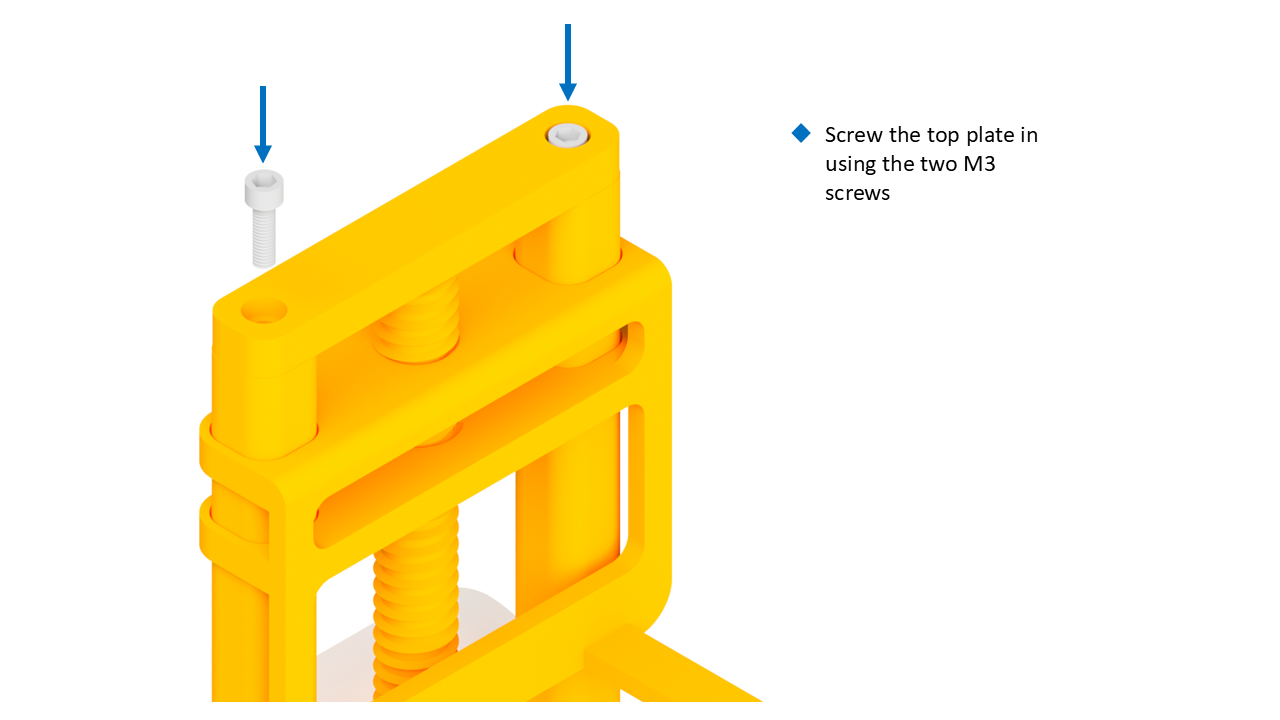
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Forklift attachment, head on over to our Forklift activity to get started! To help out with your activity, print out our bonus Meloncube, specifically designed for the Forklift attachment to pick up.
|
||||
|
||||
[
|
||||
Activity: Forklift Attachment
|
||||
](https://micromelon.com.au/resources/activity-forklift-attachment)
|
||||
[Activity: Forklift Attachment](https://micromelon.com.au/resources/activity-forklift-attachment)
|
||||
|
||||
[
|
||||
Printables: MelonCube
|
||||
](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
[Printables: MelonCube](https://www.printables.com/model/639390-micromelon-meloncube)
|
||||
|
||||
[
|
||||
Thingiverse: MelonCube
|
||||
](https://www.thingiverse.com/thing:6284246)
|
||||
[Thingiverse: MelonCube](https://www.thingiverse.com/thing:6284246)
|
||||
|
||||
[
|
||||
Makerworld: MelonCube
|
||||
](https://makerworld.com/en/models/147793?from=search#profileId-575479)
|
||||
[Makerworld: MelonCube](https://makerworld.com/en/models/147793?from=search#profileId-575479)
|
||||
|
||||
@@ -1,74 +0,0 @@
|
||||
---
|
||||
title: "Build Guide: Whiteboard Marker Holder"
|
||||
date: "2022-07-29"
|
||||
categories: ["Build Guides"]
|
||||
tags: ["Build Guide", "3D Printing"]
|
||||
excerpt: "What You’ll Need: Click on a button below to collect the print files! Printables Thingiverse Makerworld #b"
|
||||
featuredImage: "/images/resources/build-guide-pen.jpg"
|
||||
---
|
||||
|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||
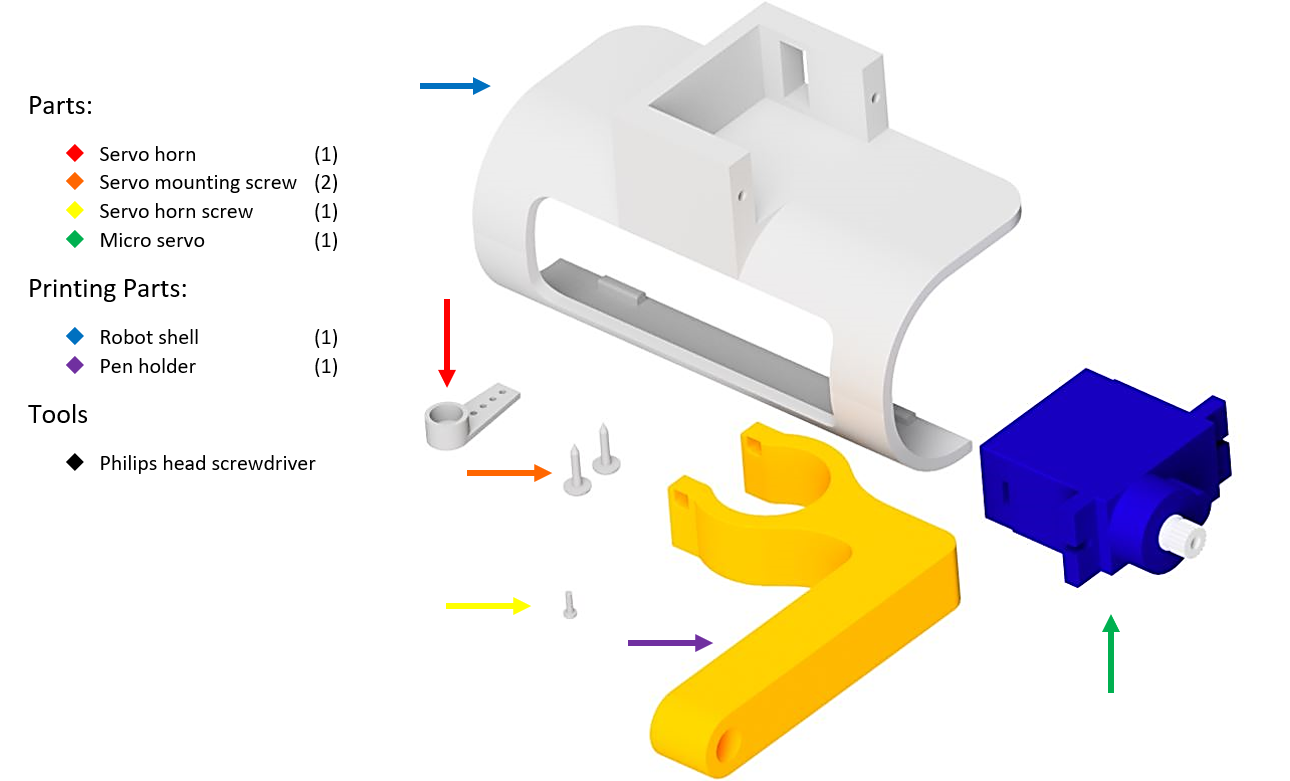
|
||||
|
||||
Click on a button below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/252743-micromelon-pen-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:5368110)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147862#profileId-641400)
|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||
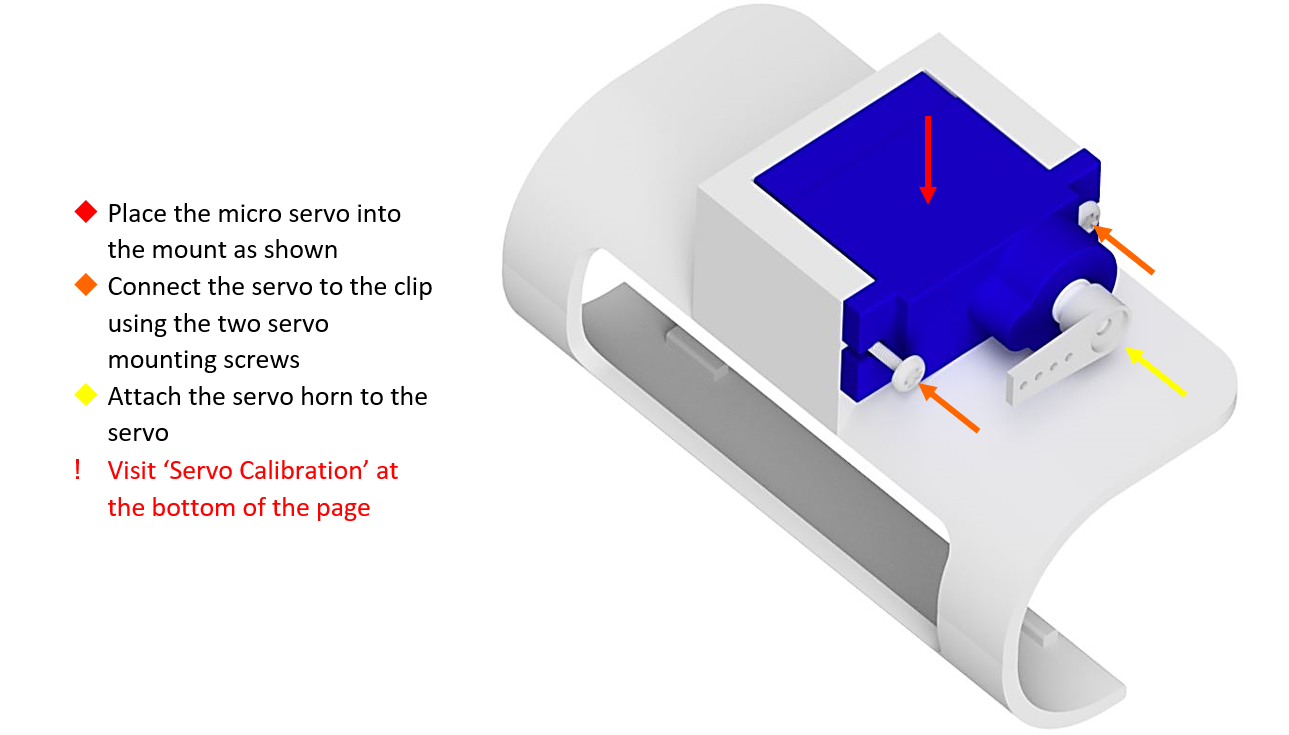
|
||||
|
||||

|
||||
|
||||
## Step 2
|
||||
|
||||
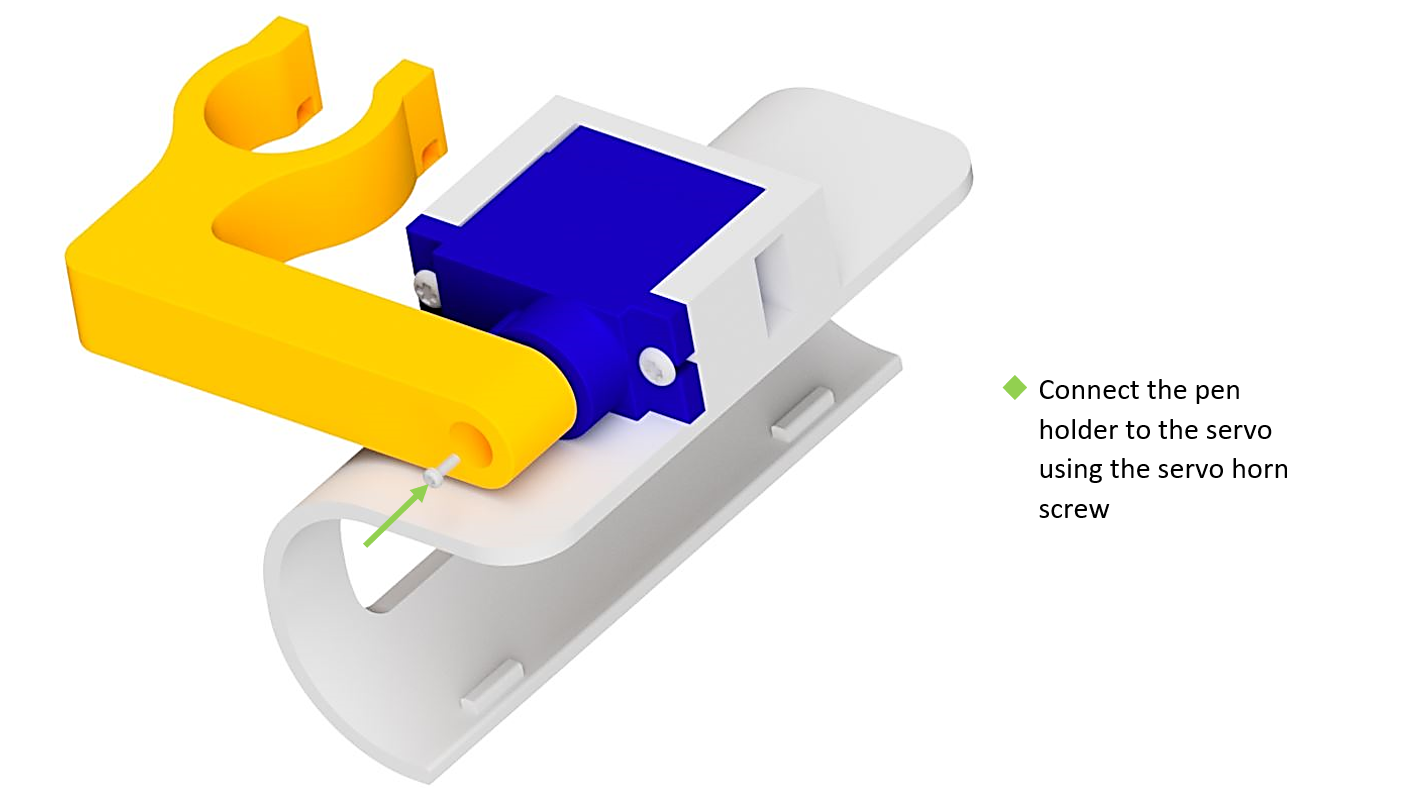
|
||||
|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Servo Calibration:
|
||||
|
||||
Before attaching a servo horn to a servo, we need to make sure that the servo moves in the correct range. This guide will help you calibrate your servos correctly.
|
||||
|
||||
---
|
||||
|
||||
#### Step 1:
|
||||
|
||||

|
||||
|
||||
Once step 1 is completed, plug the servo into the right port and run the following code:
|
||||
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Pen attachment, head on over to our rover Van Gogh activity to start drawing!
|
||||
|
||||
[
|
||||
Activity: Rover Van Gogh
|
||||
](https://micromelon.com.au/resources/rover-van-gogh?rq=attachments)
|
||||
@@ -7,86 +7,77 @@ excerpt: "What You’ll Need:When creating the printed parts, make sure to print
|
||||
featuredImage: "/images/resources/build-guide-ping-pong-shooter.PNG"
|
||||
---
|
||||
|
||||
|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||
When creating the printed parts, make sure to print the wings using PETG. These parts need to be flexible in order to shoot ping pong balls.
|
||||
|
||||
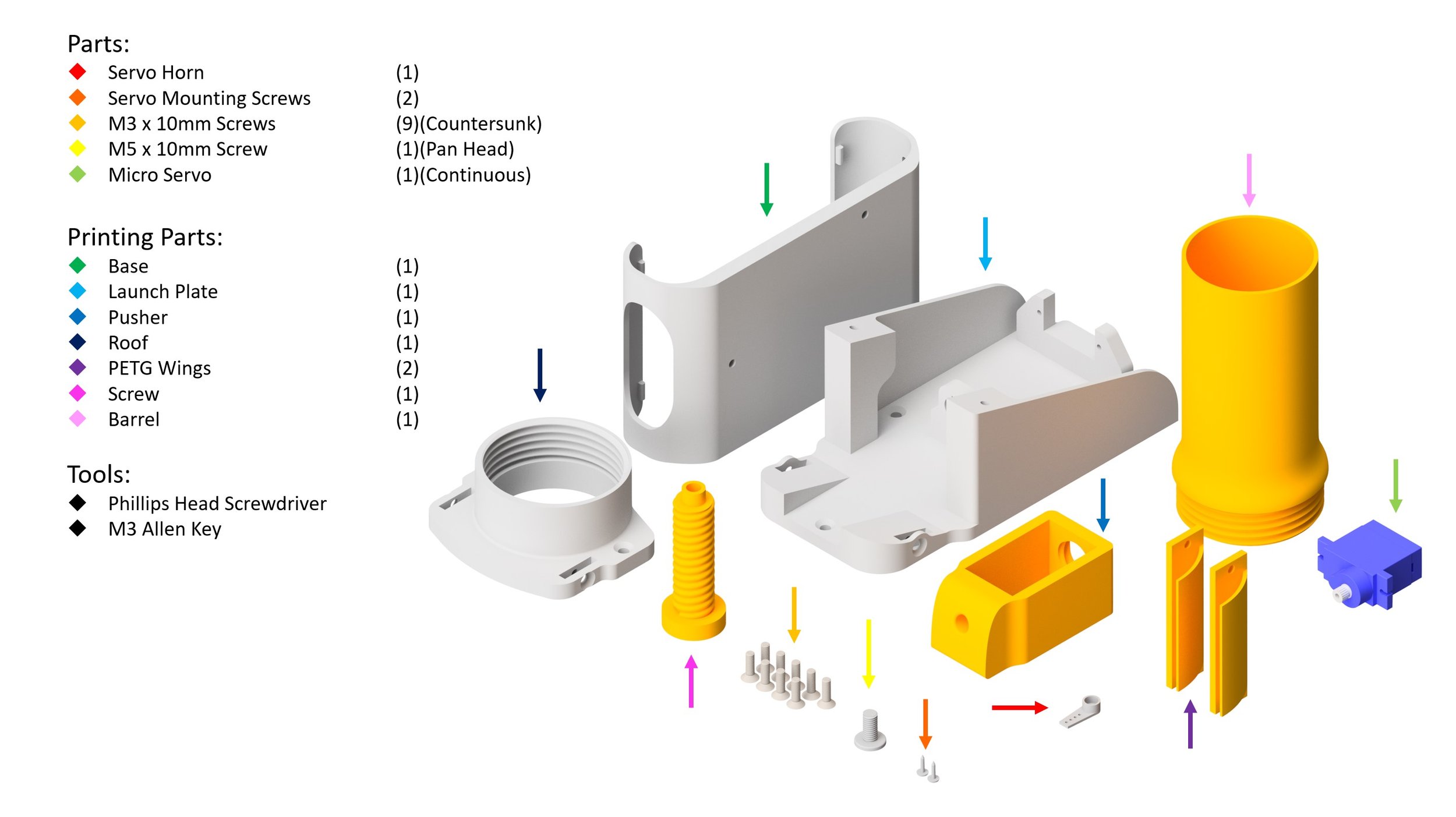
|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6284146)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6284146)
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/639385-micromelon-ping-pong-shooter-attachment)
|
||||
[Printables](https://www.printables.com/model/639385-micromelon-ping-pong-shooter-attachment)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/462433)
|
||||
[Makerworld](https://makerworld.com/en/models/462433)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 6:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 7:
|
||||
|
||||
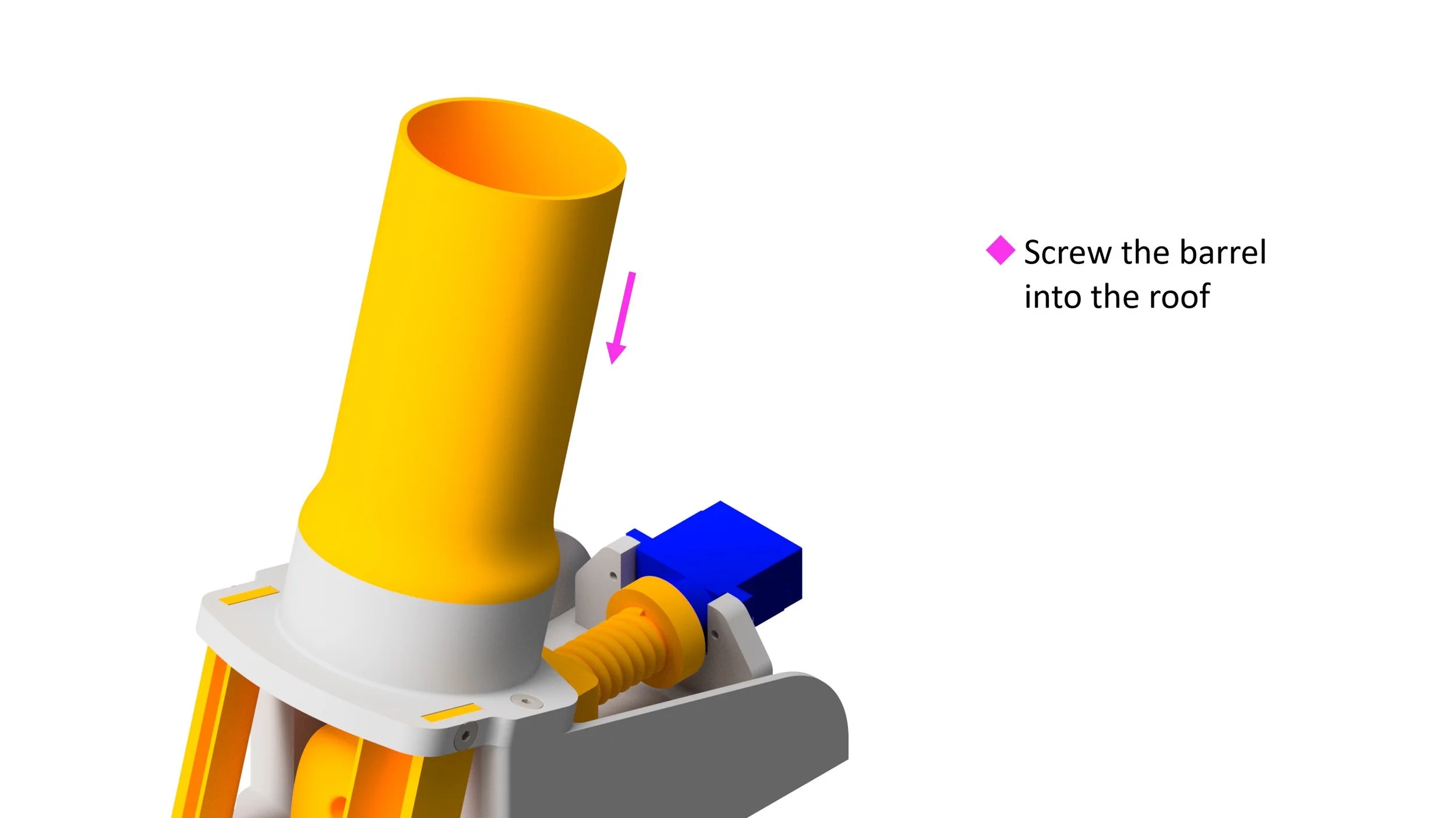
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
To see how the designs of the Ping Pong Shooter came to be, click on the button below to visit the design blog. Or if you want to test out your newly built Ping Pong Shooter attachment, click on the button to head to our ping pong activity!
|
||||
|
||||
[
|
||||
Design Blog: Ping Pong Shooter
|
||||
](https://micromelon.com.au/resources/design-blog-ping-pong-shooter)
|
||||
[Design Blog: Ping Pong Shooter](https://micromelon.com.au/resources/design-blog-ping-pong-shooter)
|
||||
|
||||
[
|
||||
Activity: Ping Pong Shooter
|
||||
](/resources/activity-pingpong-attachment)
|
||||
[Activity: Ping Pong Shooter](/resources/activity-ping-pong-shooter)
|
||||
|
||||
@@ -7,75 +7,70 @@ excerpt: "What You’ll Need: Click on the buttons below to collect the print fi
|
||||
featuredImage: "/images/resources/build-guide-planter.png"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||

|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/639387-micromelon-seed-planter-attachment)
|
||||
[Printables](https://www.printables.com/model/639387-micromelon-seed-planter-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6284174)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6284174)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147788)
|
||||
[Makerworld](https://makerworld.com/en/models/147788)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 6:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 7:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
# Servo Calibration
|
||||
|
||||
@@ -85,20 +80,16 @@ Before attaching a servo horn to a servo, we need to make sure that the servo mo
|
||||
|
||||
#### Step 6:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 6 is completed, plug the servo into the left port and run the following code:
|
||||
|
||||
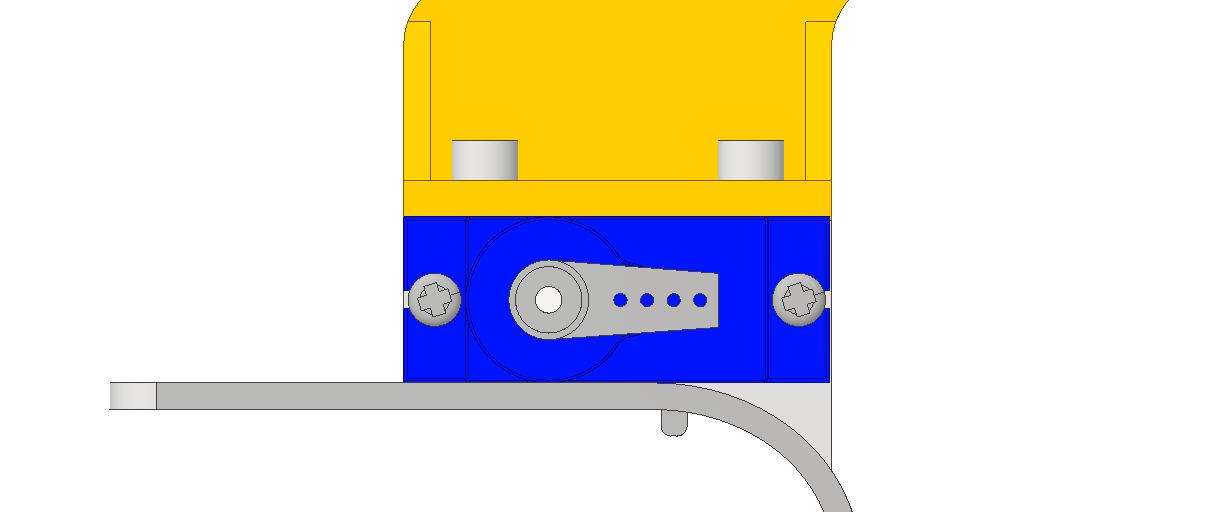
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Seed Planter attachment, head on over to our Seed Planter activity to get started!
|
||||
|
||||
[
|
||||
Activity: Seed Planter
|
||||
](https://micromelon.com.au/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
With your fully built Micromelon Seed Planter attachment, head on over to our Seed Planter activity to get started
|
||||
|
||||
@@ -7,81 +7,76 @@ excerpt: "What You’ll Need: Click on the buttons below to collect the print fi
|
||||
featuredImage: "/images/resources/build-guide-roborave-line-follow.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||
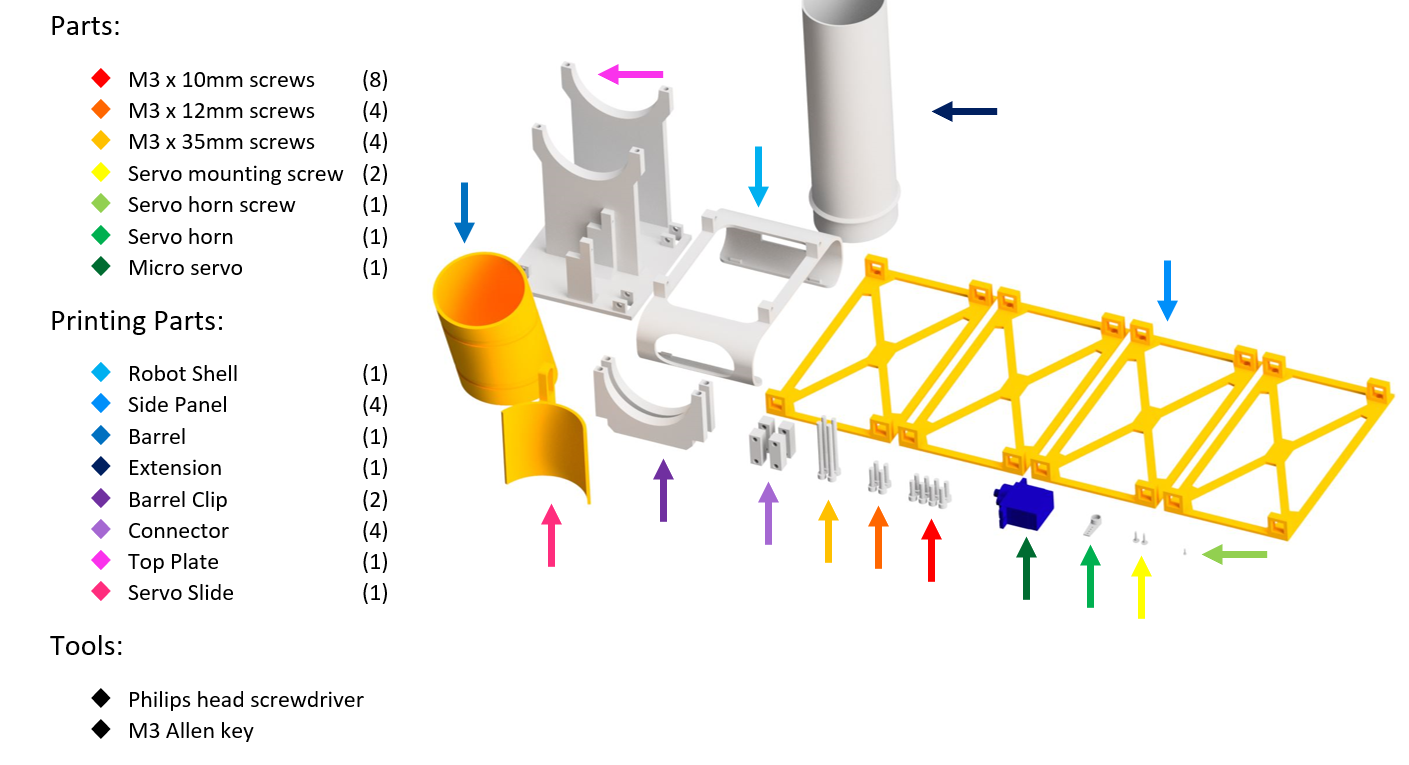
|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/639386-micromelon-roborave-line-follow-attachment)
|
||||
[Printables](https://www.printables.com/model/639386-micromelon-roborave-line-follow-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:6284165)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:6284165)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147778)
|
||||
[Makerworld](https://makerworld.com/en/models/147778)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||
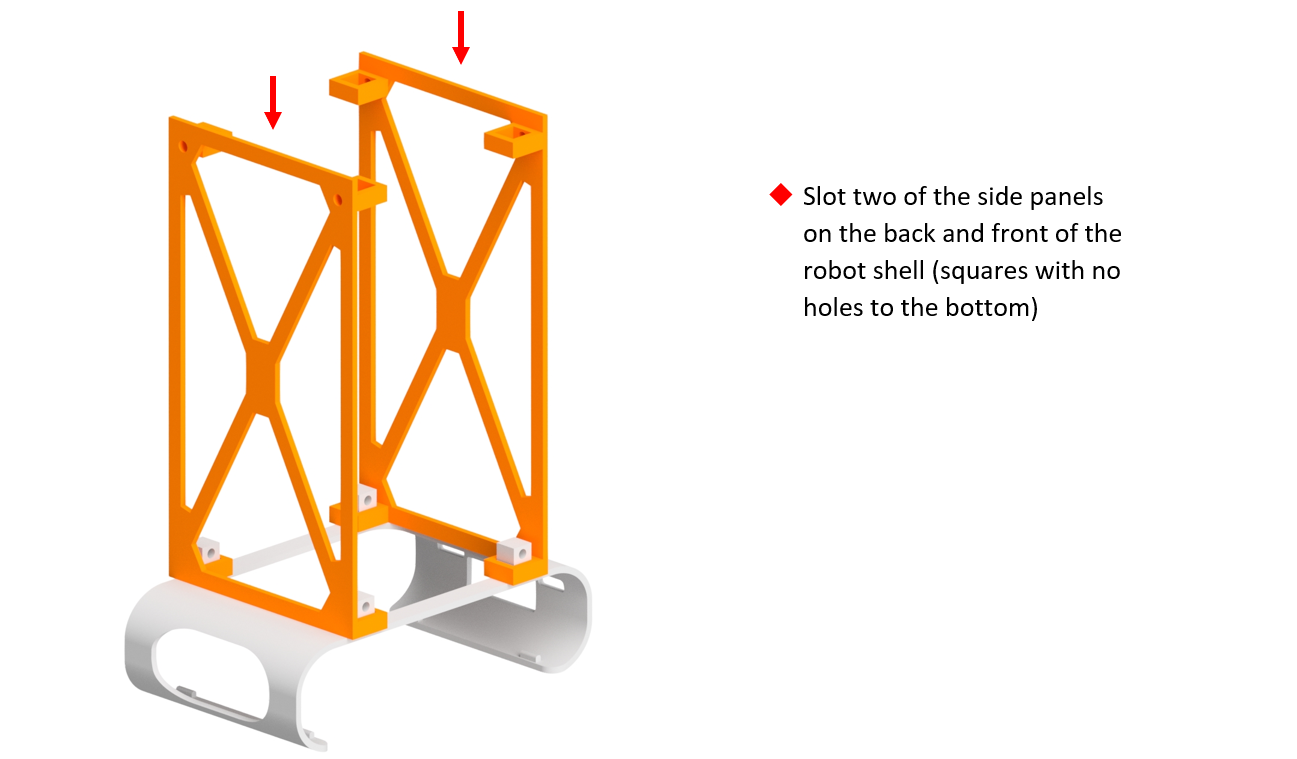
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||
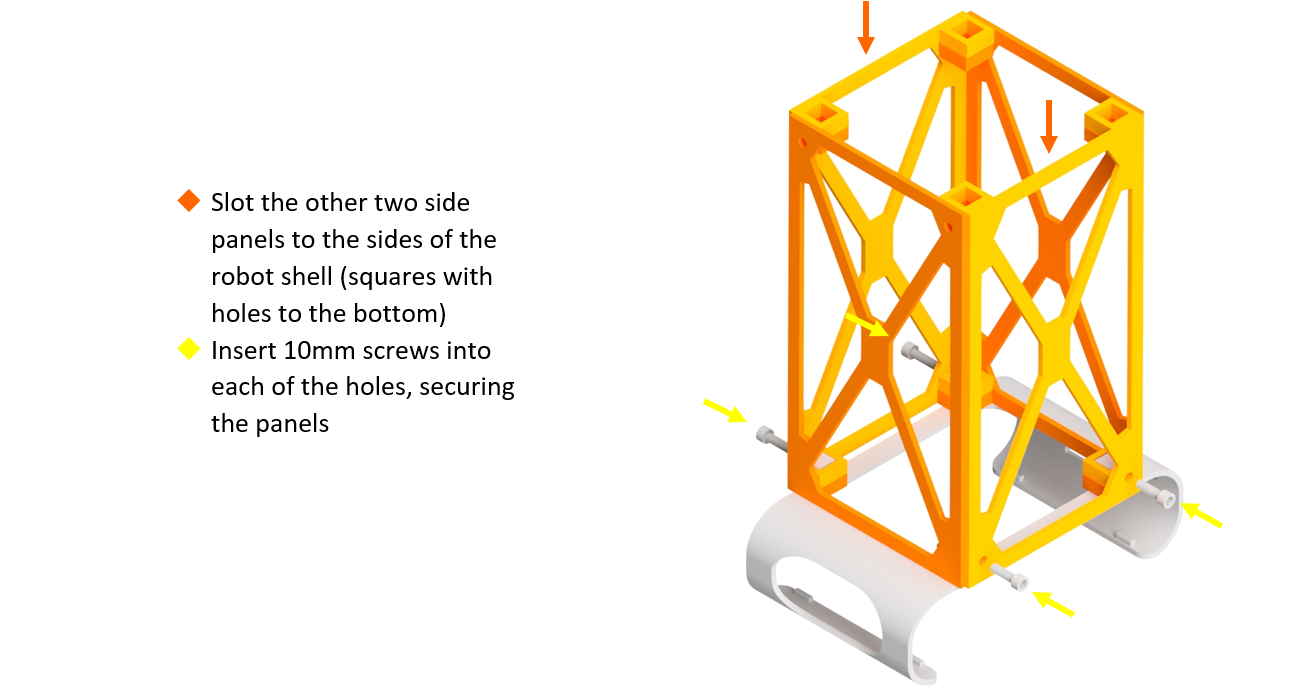
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||
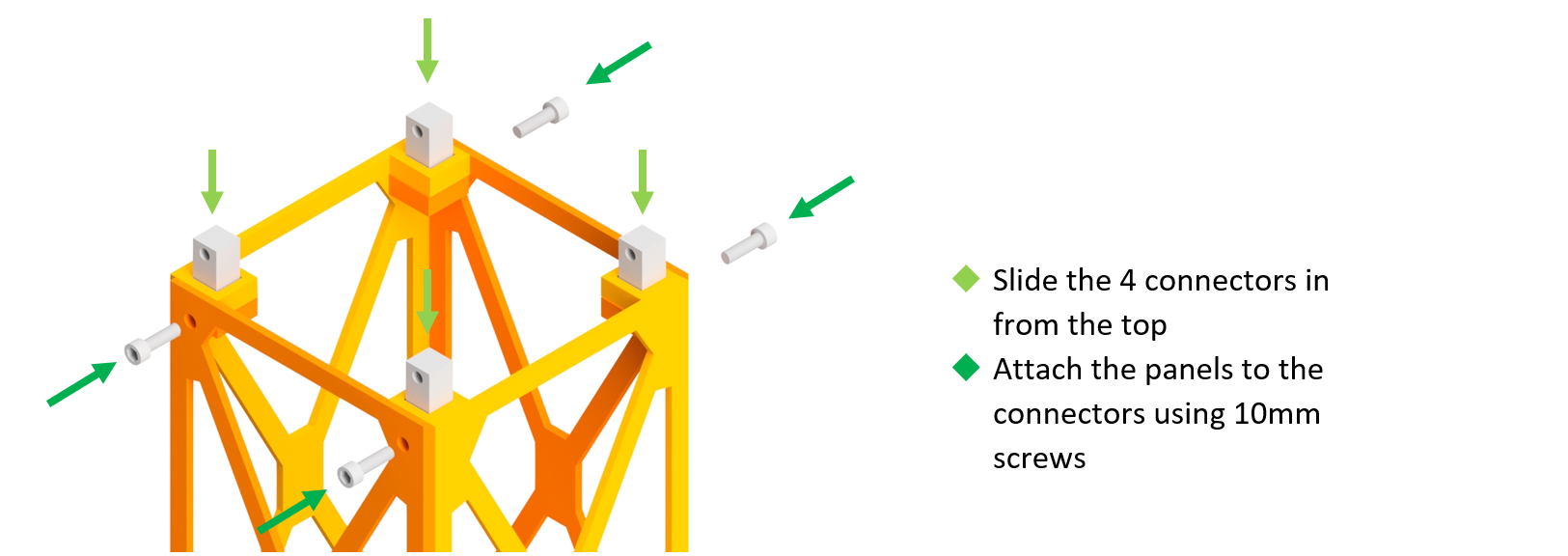
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||
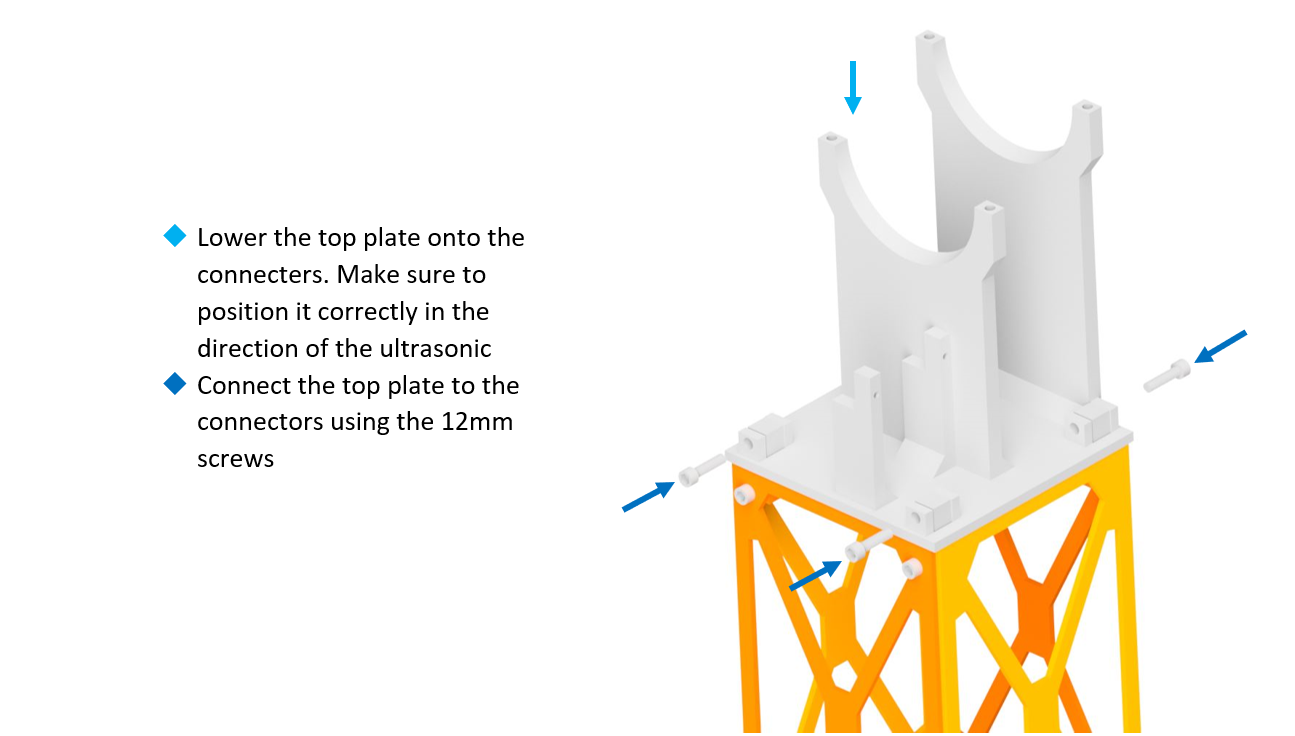
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||
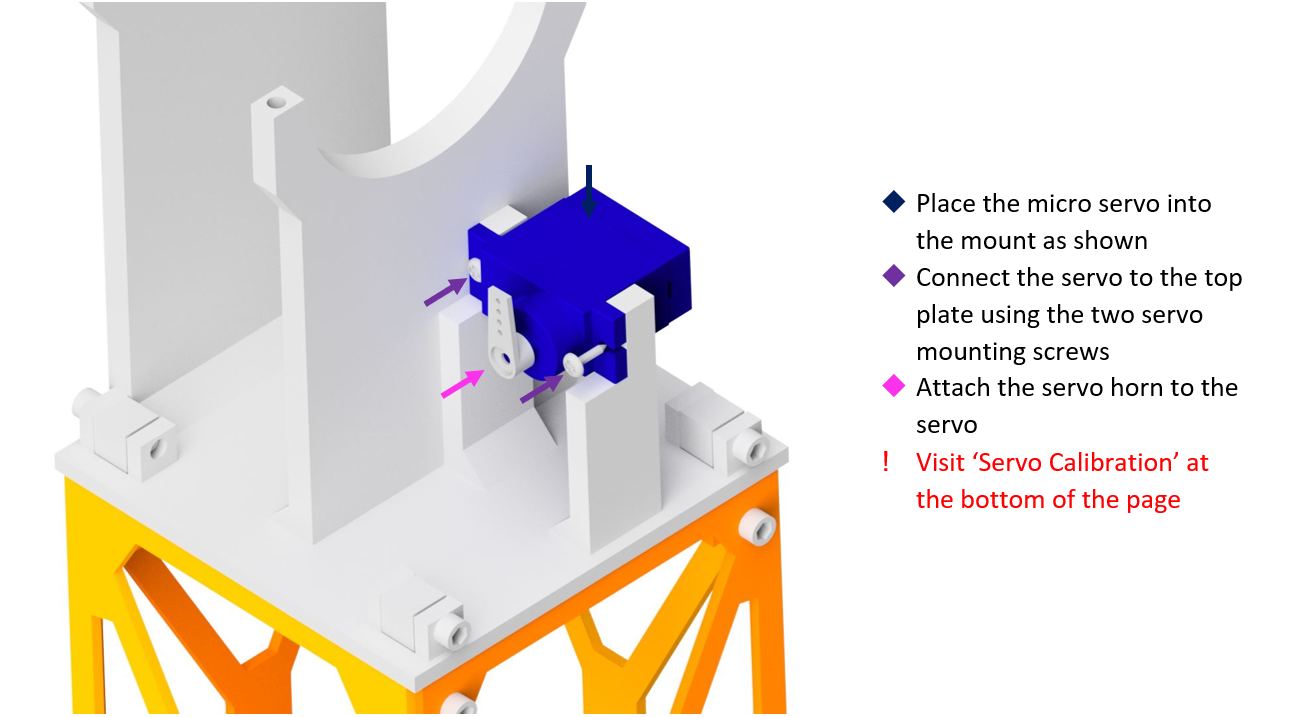
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 6:
|
||||
|
||||
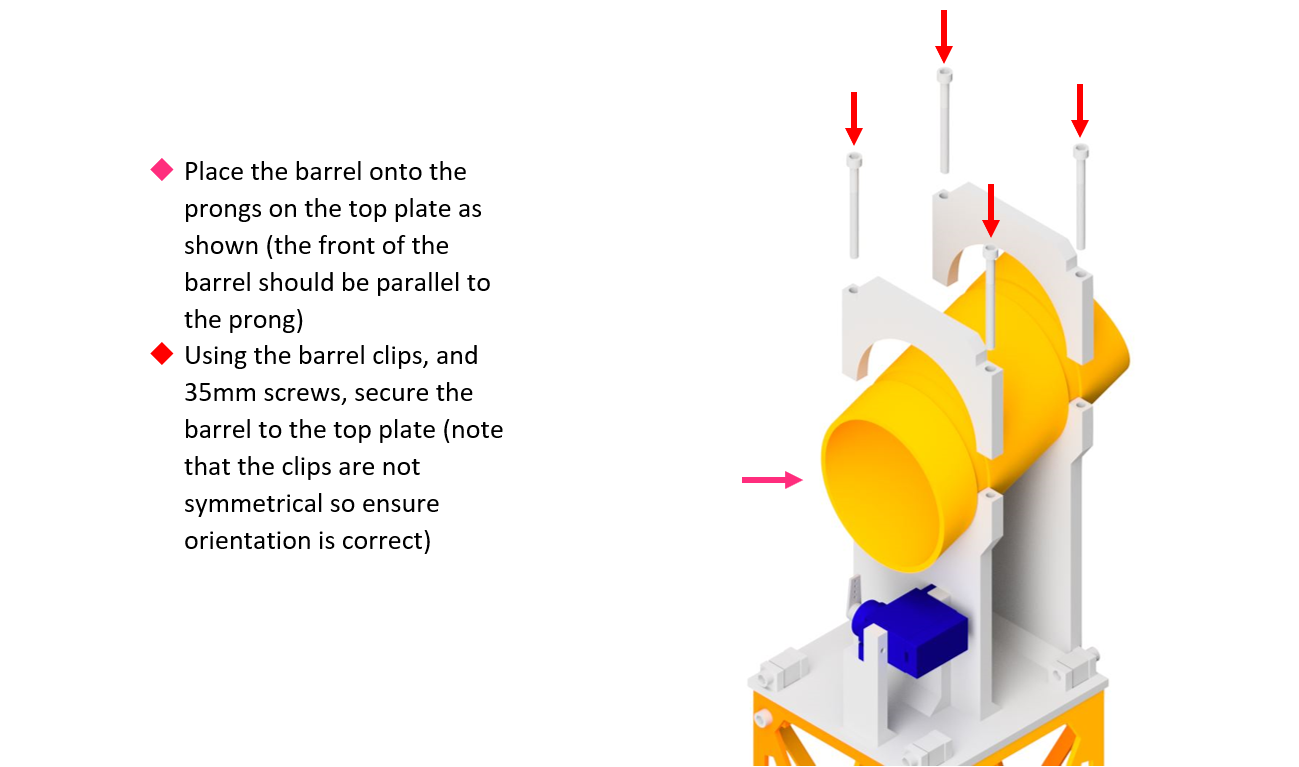
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 7:
|
||||
|
||||
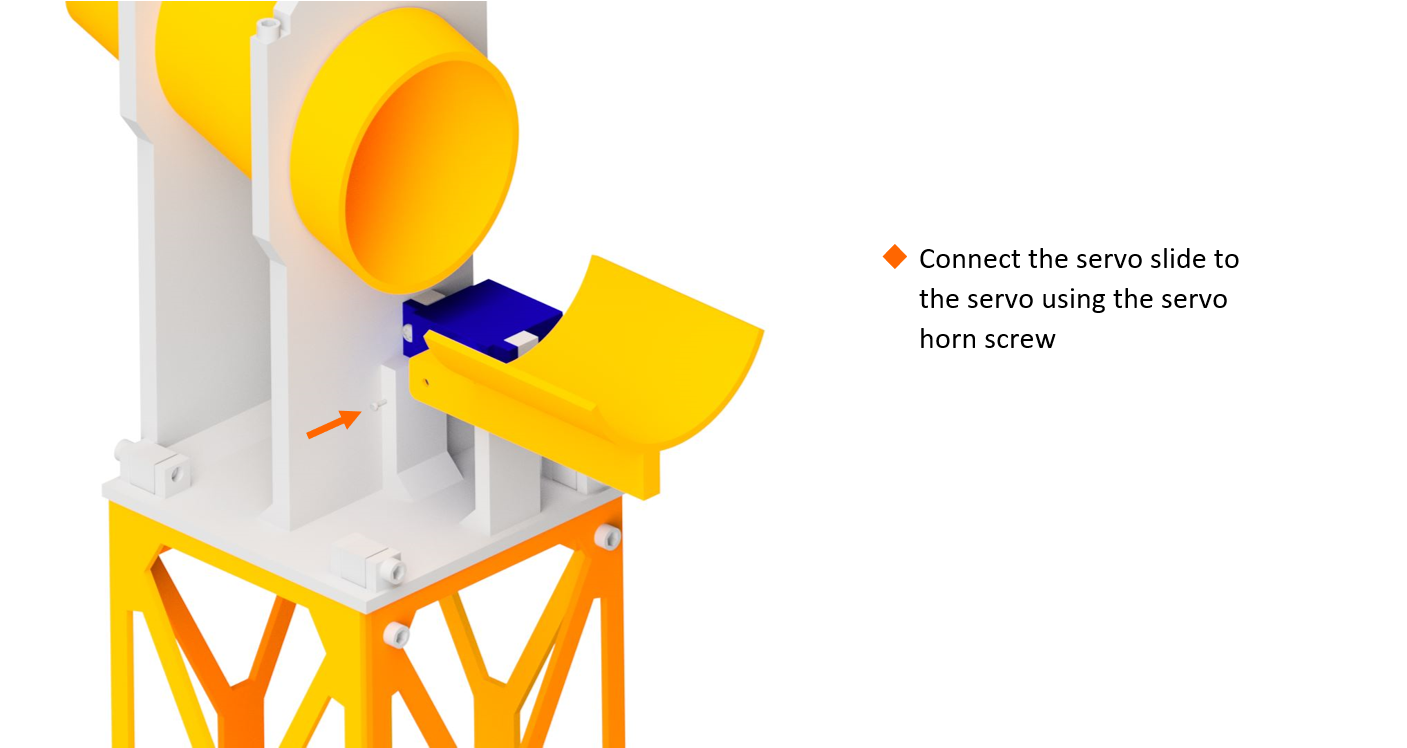
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 8:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Servo Calibration:
|
||||
|
||||
@@ -91,20 +86,16 @@ Before attaching a servo horn to a servo, we need to make sure that the servo mo
|
||||
|
||||
#### Step 5:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 5 is completed, plug the servo into the right port and run the following code
|
||||
|
||||
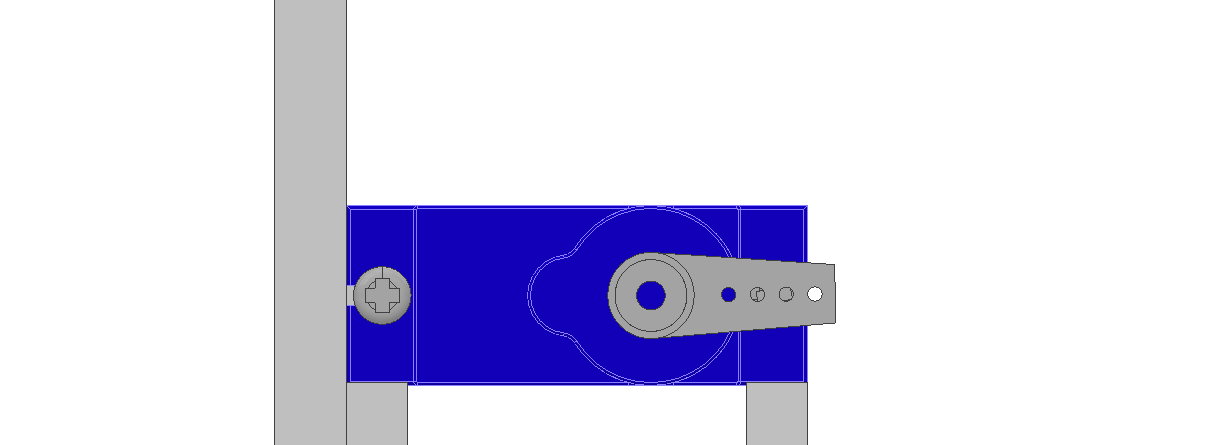
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon RoboRAVE attachment, head on over to our guide to RoboRAVE line follow to get started!
|
||||
|
||||
[
|
||||
Guide to RoboRAVE Line Follow
|
||||
](https://micromelon.com.au/resources/guide-to-roborave-line-follow)
|
||||
With your fully built Micromelon RoboRAVE attachment, head on over to our guide to RoboRAVE line follow to get started
|
||||
|
||||
@@ -7,87 +7,82 @@ excerpt: "What You’ll Need: Click on the buttons below to collect the print fi
|
||||
featuredImage: "/images/resources/build-guide-tipper.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||

|
||||

|
||||
|
||||
Click on the buttons below to collect the print files!
|
||||
|
||||
[
|
||||
Printables
|
||||
](https://www.printables.com/model/252744-micromelon-tipper-attachment)
|
||||
[Printables](https://www.printables.com/model/252744-micromelon-tipper-attachment)
|
||||
|
||||
[
|
||||
Thingiverse
|
||||
](https://www.thingiverse.com/thing:5317282)
|
||||
[Thingiverse](https://www.thingiverse.com/thing:5317282)
|
||||
|
||||
[
|
||||
Makerworld
|
||||
](https://makerworld.com/en/models/147786#profileId-575448)
|
||||
[Makerworld](https://makerworld.com/en/models/147786#profileId-575448)
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 2:
|
||||
|
||||
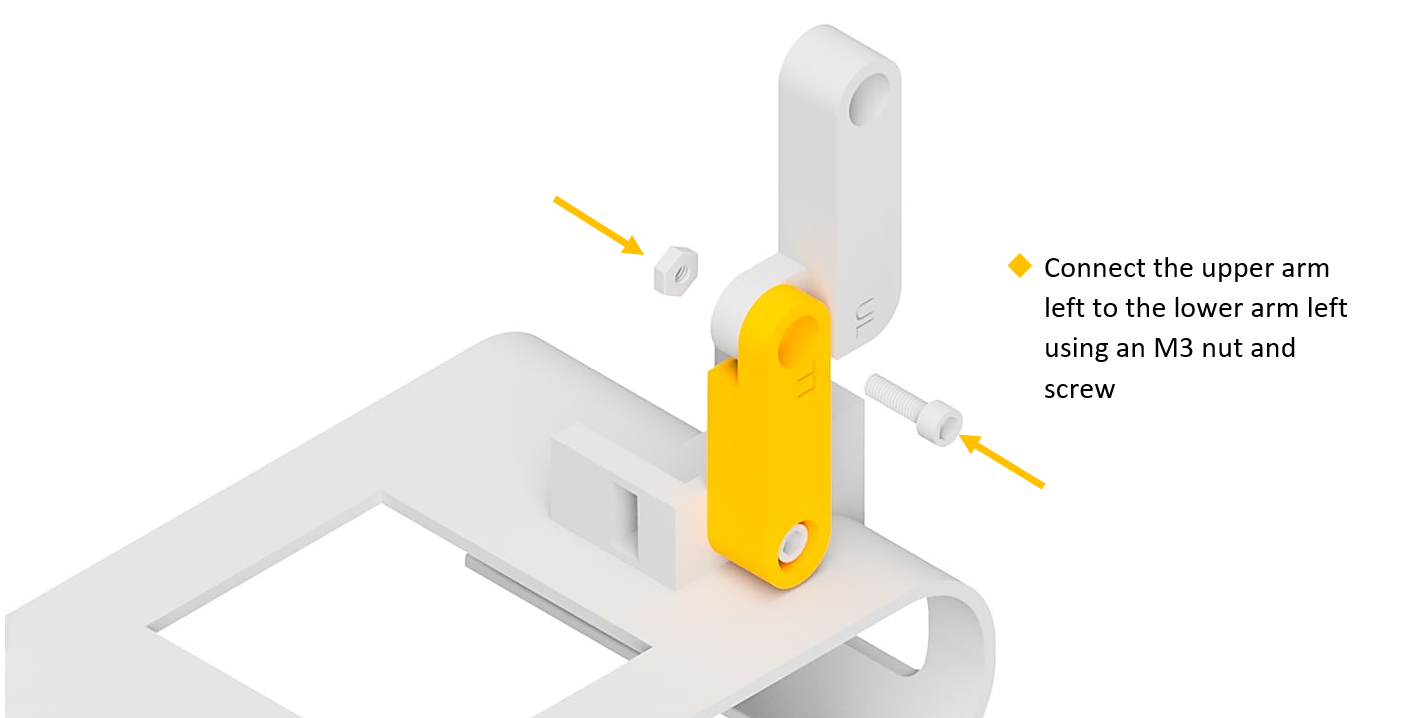
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 3:
|
||||
|
||||
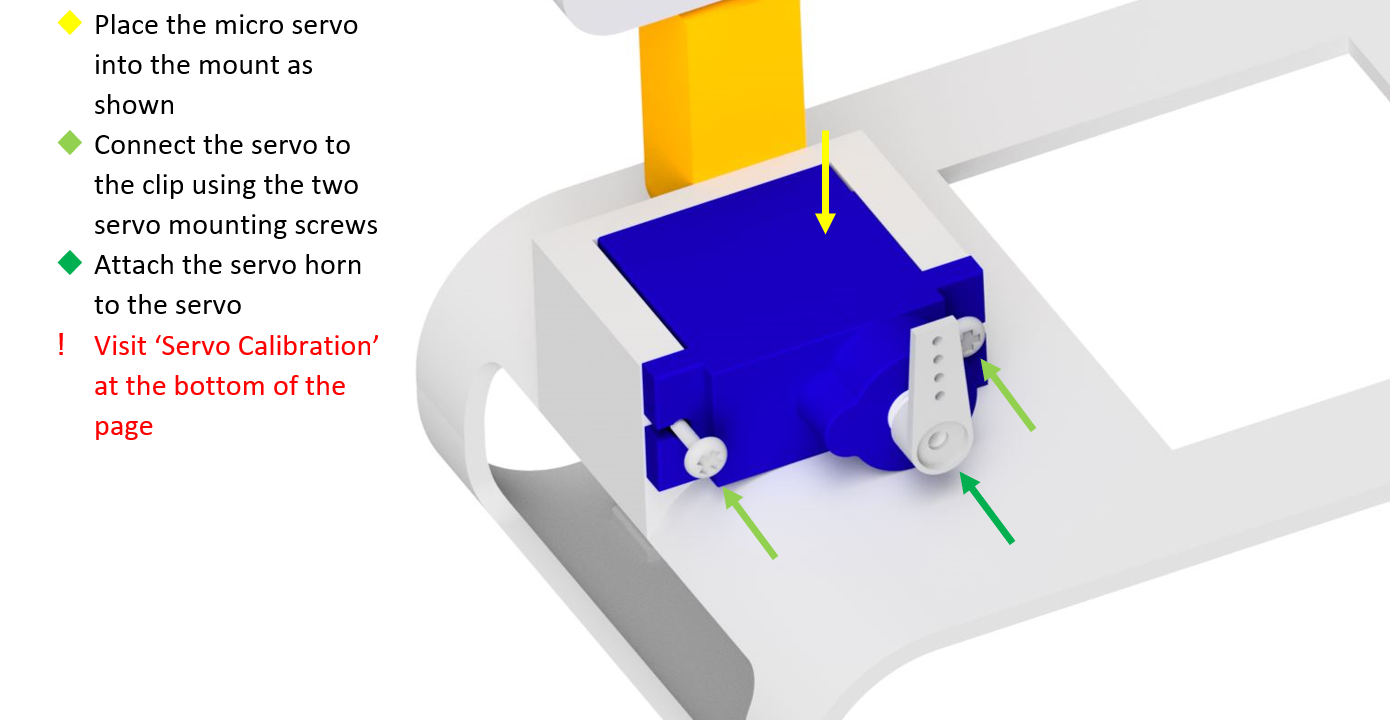
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 4:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 5:
|
||||
|
||||
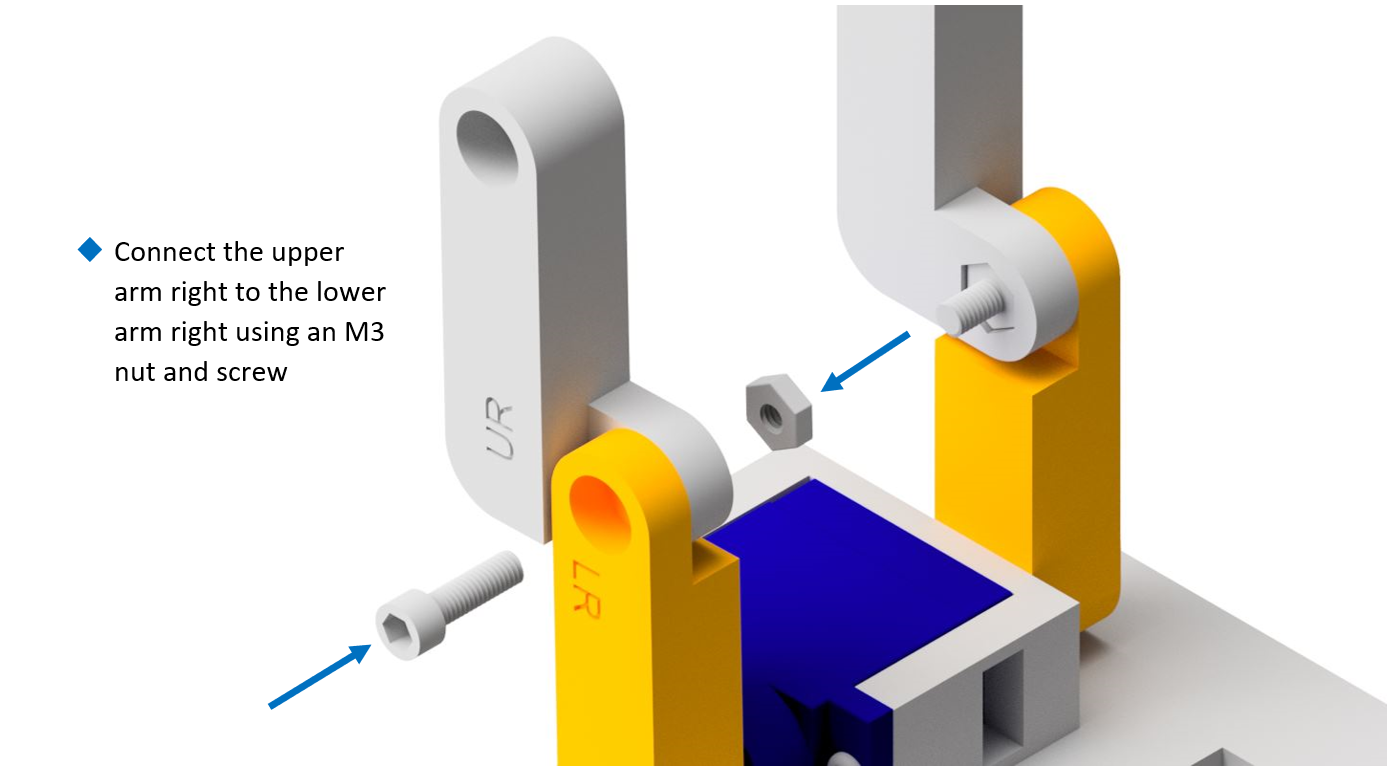
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 6:
|
||||
|
||||
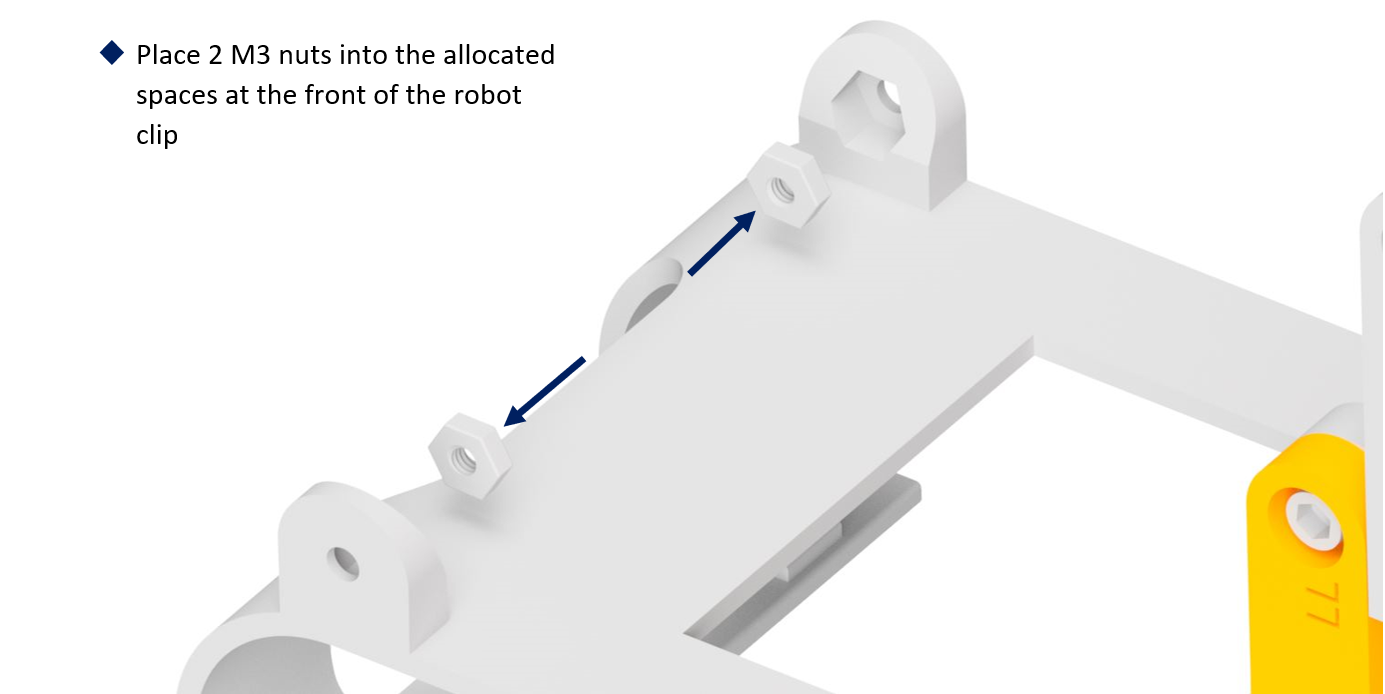
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 7:
|
||||
|
||||
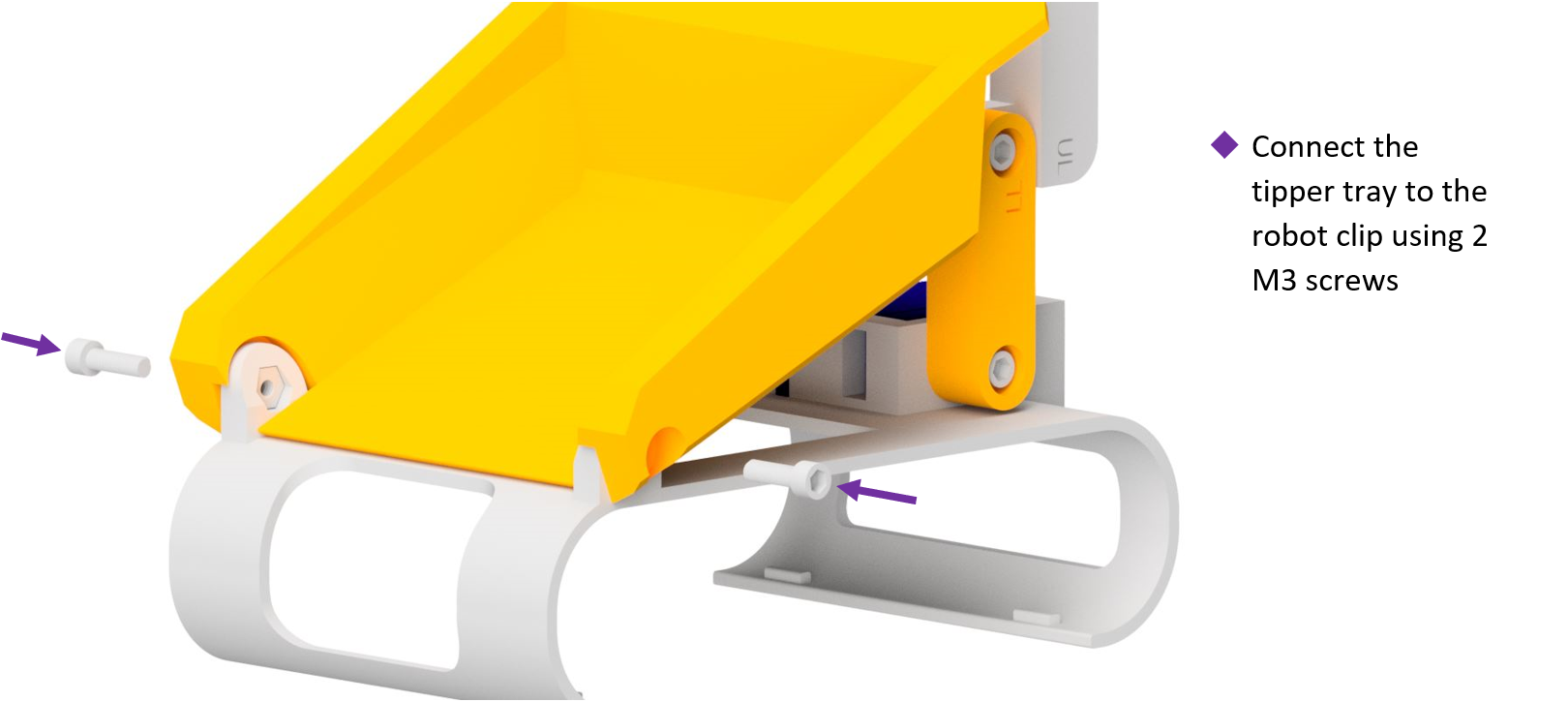
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 8:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Step 9:
|
||||
|
||||
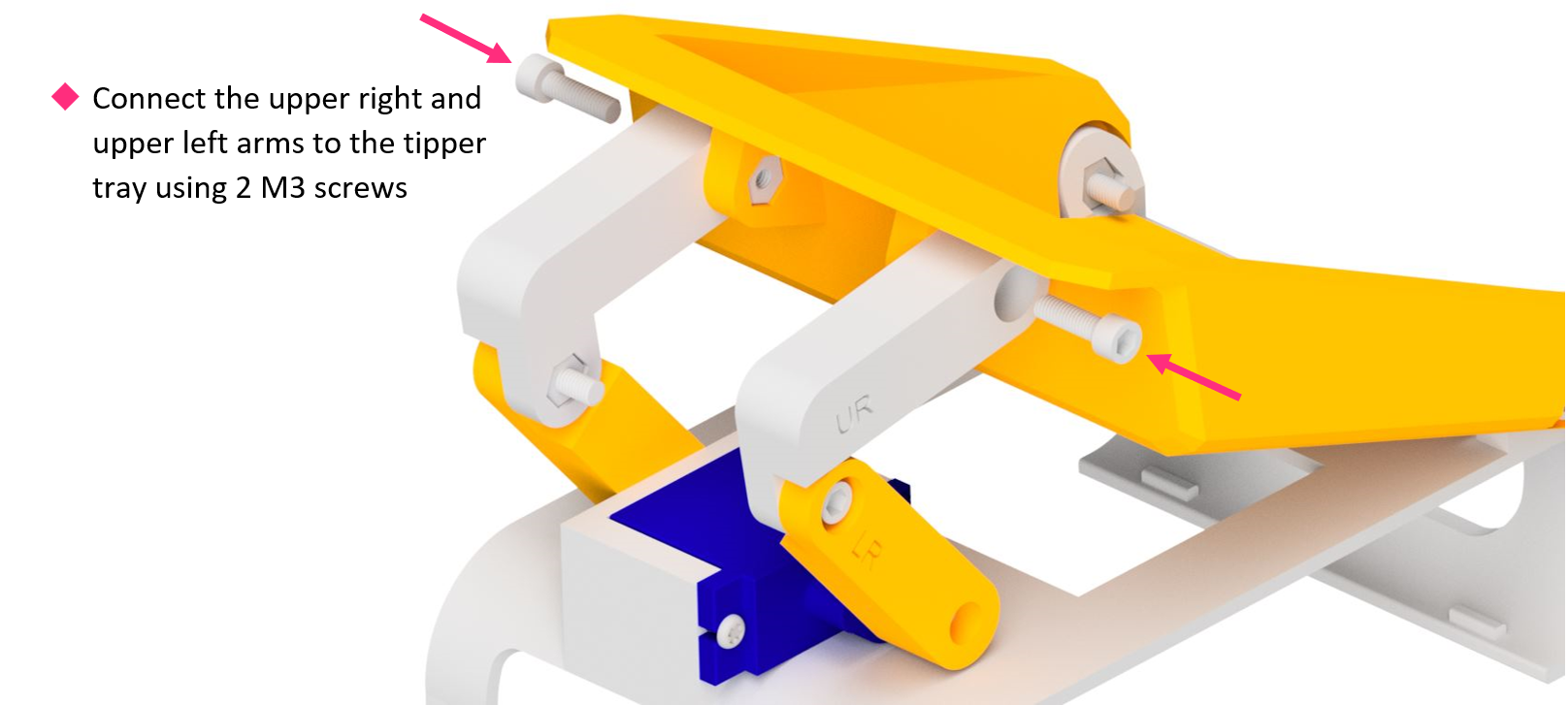
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## Complete:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
### Servo Calibration:
|
||||
|
||||
@@ -97,20 +92,16 @@ Before attaching a servo horn to a servo, we need to make sure that the servo mo
|
||||
|
||||
#### Step 3:
|
||||
|
||||

|
||||

|
||||
|
||||
Once step 3 is completed, plug the servo into the right port and run the following code:
|
||||
|
||||
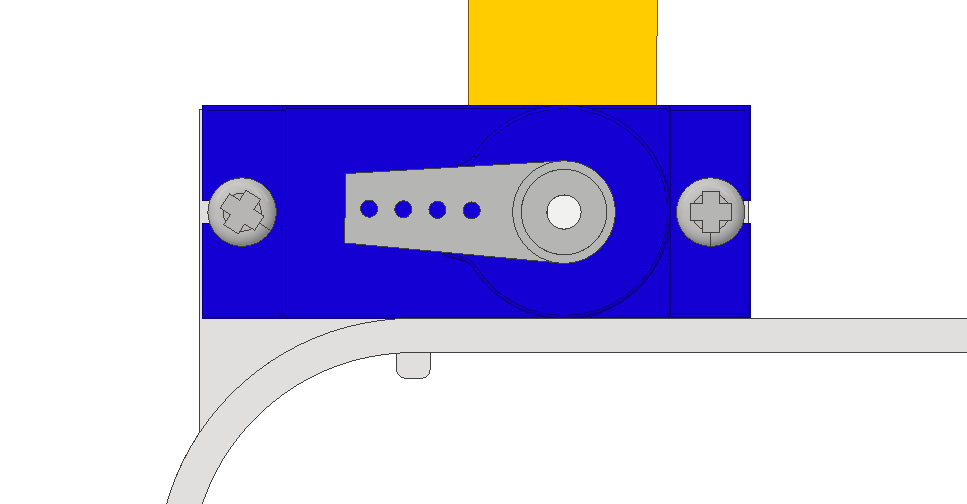
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Tipper attachment, head on over to our Digger and Tipper activity to get started!
|
||||
|
||||
[
|
||||
Activity: Digger and Tipper
|
||||
](/resources/activity-digger-and-tipper-attachment)
|
||||
With your fully built Micromelon Tipper attachment, head on over to our Digger and Tipper activity to get started
|
||||
|
||||
65
content/resources/build-guide-whiteboard-marker-holder.mdx
Normal file
65
content/resources/build-guide-whiteboard-marker-holder.mdx
Normal file
@@ -0,0 +1,65 @@
|
||||
---
|
||||
title: "Build Guide: Whiteboard Marker Holder"
|
||||
date: "2022-07-29"
|
||||
categories: ["Build Guides"]
|
||||
tags: ["Build Guide", "3D Printing"]
|
||||
excerpt: "What You’ll Need: Click on a button below to collect the print files! Printables Thingiverse Makerworld #b"
|
||||
featuredImage: "/images/resources/build-guide-whiteboard-marker-holder.jpg"
|
||||
---
|
||||
|
||||

|
||||
|
||||
## What You’ll Need:
|
||||
|
||||

|
||||
|
||||
Click on a button below to collect the print files!
|
||||
|
||||
[Printables](https://www.printables.com/model/252743-micromelon-pen-attachment)
|
||||
|
||||
[Thingiverse](https://www.thingiverse.com/thing:5368110)
|
||||
|
||||
[Makerworld](https://makerworld.com/en/models/147862#profileId-641400)
|
||||
|
||||
|
||||

|
||||
|
||||
## Step 1:
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Step 2
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Complete
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
## Servo Calibration:
|
||||
|
||||
Before attaching a servo horn to a servo, we need to make sure that the servo moves in the correct range. This guide will help you calibrate your servos correctly.
|
||||
|
||||
---
|
||||
|
||||
#### Step 1:
|
||||
|
||||

|
||||
|
||||
Once step 1 is completed, plug the servo into the right port and run the following code:
|
||||
|
||||

|
||||
|
||||
Upload the code and attach the servo horn to the servo so it’s in this position when the servo is at 0.
|
||||
|
||||

|
||||
|
||||
## What’s Next?
|
||||
|
||||
With your fully built Micromelon Pen attachment, head on over to our rover Van Gogh activity to start drawing
|
||||
@@ -11,7 +11,7 @@ featuredImage: "/images/resources/cargo-bot.png"
|
||||
|
||||
Create a small obstacle course for rovers to drive through whilst carrying cargo on top. Students need to program their rover motors carefully to navigate through the course with as much cargo on board as possible. This is a simple exercise to help students practice using rover motors and understand how to regulate speed.
|
||||
|
||||

|
||||

|
||||
|
||||
### Setup
|
||||
|
||||
@@ -19,7 +19,7 @@ This exercise is about students learning that slow and steady often works better
|
||||
|
||||
### Some Useful Blocks
|
||||
|
||||

|
||||

|
||||
|
||||
Example code
|
||||
|
||||
@@ -28,61 +28,3 @@ The correct answer for this challenge will change depending on the obstacle cour
|
||||
The blocks to the right are some of the different type of ways you can program a rover to move and turn. We encourage students to try and experiment with different movement blocks to learn how to determine what blocks are useful in what scenarios.
|
||||
|
||||
We let students use fixed distance blocks in this exercise as the aim is to help them understand the important of choosing the right motor speed. You can add your own rules to introduce concepts like branching and iteration with sensors depending on the obstacle course.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "The Colour Sensor"
|
||||
date: "2021-06-30"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Sensor Guides"]
|
||||
tags: []
|
||||
excerpt: "Learn what the colour sensor is and how to code it."
|
||||
featuredImage: "/images/resources/colour-sensor.gif"
|
||||
@@ -15,15 +15,15 @@ The Rover is designed to have three sensors to make it possible to attempt more
|
||||
|
||||
The colour sensors are designed to detect what colour they are currently facing. They are located on the underside of the rover so we can determine what colour the surface is that the Rover is driving over.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
### What Exactly is Light & Colour?
|
||||
|
||||
Before we learn about how the colour sensors work, let’s learn a bit more about what colour is. Colour as we see it on things around us like green in grass and brown in wood is produced by light. The visible light emitted by the sun or a light bulbs reflecting off of objects which makes it possible for us to see what colour they are. Light is actually made up of electromagnetic waves. The science behind electromagnetic waves and how we see them is complicated, for now all we need to know is they are types of light. Electromagnetic waves vary in length, similar to how there are big waves and small waves at the beach. The size of the electromagnetic wave determines what colour that light will be. All visible light we see with our eyes ranges from about 380nm (nanometres) to 750nm. Below is a diagram of the visible light spectrum.
|
||||
|
||||

|
||||

|
||||
|
||||
As we can see in our light spectrum, violets and blues are shorter electromagnetic waves at around 380-485nm and orange and reds have longer wave lengths at around 590-750nm.
|
||||
|
||||
@@ -31,7 +31,7 @@ As we can see in our light spectrum, violets and blues are shorter electromagnet
|
||||
|
||||
White is a colour but why is white on the colour spectrum? The reason it’s not there is because white light is actually what we are seeing when we see all coloured light at once. White light is the kind of light emitted from the sun.
|
||||
|
||||
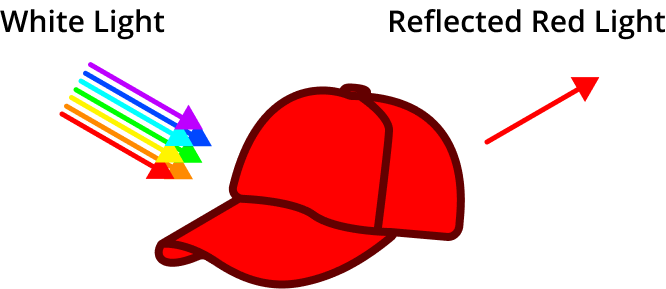
|
||||

|
||||
|
||||
**White Light Becomes the Colour We See in Objects**
|
||||
|
||||
@@ -41,9 +41,9 @@ When white light is produced it travels outwards and hits things in the world. W
|
||||
|
||||
To detect what colour the colour sensor is facing, all the colour sensor has to do is detect what coloured light is being reflected off of that surface. Each colour sensor has 4 LEDs and a light detector. Let’s breakdown how these components work together to detect surface colour.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
- The colour sensor LEDs illuminate with white light (white light consists of all coloured light from the visible light spectrum).
|
||||
|
||||
@@ -77,25 +77,23 @@ Open the Code Editor, connect to a Micromelon Rover and open up the sensor view.
|
||||
|
||||
In the sensor view dialog, the colour sensor values are located in the top right table. The table has a range of colour values. The top row contains the approximated colour the Rover colour sensors see.
|
||||
|
||||

|
||||

|
||||
|
||||
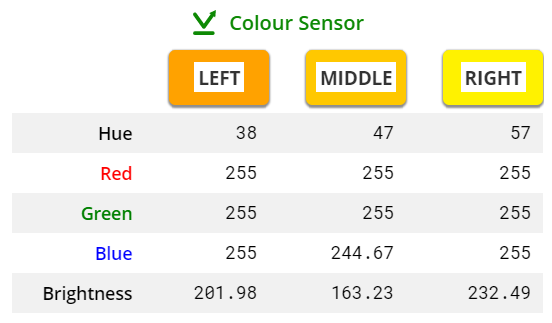
|
||||

|
||||
|
||||
**Understanding The Values**
|
||||
|
||||
Unlike the ultrasonic sensor or IR sensor that have one default value, the colour sensors report to use a range of different values we can use in different scenarios. The left, middle and right sensor all return the same type of data. Each sensor has a **hue, red, green, blue **and **brightness** values. Let’s breakdown and understand the values that the sensors return.
|
||||
**Understanding The Values** Unlike the ultrasonic sensor or IR sensor that have one default value, the colour sensors report to use a range of different values we can use in different scenarios. The left, middle and right sensor all return the same type of data. Each sensor has a ** hue, red, green, blue** and ** brightness** values. Let’s breakdown and understand the values that the sensors return.
|
||||
|
||||
**Hue**
|
||||
|
||||
Hue is a way to define colour based on a range of 0 to 360. This range is based on the 360 degrees of a colour wheel. All colours that humans perceive are represented on a degree of the wheel. But where exactly are black and white? Hue is one component of the HSV (hue, saturation, value) colour model. The saturation and value components of the HSV colour spectrum help us demonstrate black and white. Our Rover only communicates the hue of a colour and not the saturation or value.
|
||||
|
||||

|
||||

|
||||
|
||||
**Red, Green & Blue (RGB)**
|
||||
|
||||
The red, green and blue values are in the range of 0 to 255. The red values show the amount of red light the sensor detects, blue values for blue light and green values for green light. A sensor facing a pure red surface will show a high red value and low green and blue values. A sensor facing a pure yellow surface will show a high red & green value but low blue value. This follows the logic of the RGB colour model where combining colours creates new colours. You can use the RGB values to determine what colour you are looking at.
|
||||
|
||||

|
||||

|
||||
|
||||
**Brightness**
|
||||
|
||||
@@ -105,7 +103,7 @@ Brightness is a value in the range of 0 to 255. The brightness value shows how m
|
||||
|
||||
Let’s write a simple program to make our Rover set its LED colour to the colour it currently sees from the middle colour sensor.
|
||||
|
||||
|
||||

|
||||
|
||||
- Start with our **While True** loop as this program will need to be repeated many times in order for the sensor to keep gathering data.
|
||||
|
||||
@@ -124,213 +122,3 @@ While this code is running our rover will be changing its LEDs to match the colo
|
||||
### Wrapping Up
|
||||
|
||||
Now that we’re familiar with what the colour sensor is, how it works and how to program it, it’s time to start doing some activities. Try these activities that require using the colour sensors.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-rover-theremin)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Rover Theremin](/resources/activity-rover-theremin)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/activity-rover-theremin)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Seed Planter](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-pingpong-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Ping-Pong Shooter](/resources/activity-pingpong-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/activity-pingpong-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-forklift-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Forklift Attachment](/resources/activity-forklift-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/activity-forklift-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-claw-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Claw Attachment](/resources/activity-claw-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/activity-claw-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-digger-and-tipper-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Activity: Digger and Tipper](/resources/activity-digger-and-tipper-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
[Read More →](/resources/activity-digger-and-tipper-attachment)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All), [Simulator Activities](/resources?category=Simulator+Activities)
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn iteration and how to use the colour sensor, LEDs, and buzzer."
|
||||
featuredImage: "/images/resources/colourful-sounds.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Create a program that allows our robot to translate data from the colour sensors to display on the LEDs and play sounds. When you move your rover over new colours the LEDs will match that surface colour and create sound unique to that colour.
|
||||
|
||||
@@ -55,7 +54,7 @@ Create a program that allows our robot to translate data from the colour sensors
|
||||
|
||||
Buzzer
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -77,64 +76,6 @@ The hue colour sensor block returns a single number. We can program our rover’
|
||||
|
||||
We want to repeat this behaviour indefinitely so once it’s running we can pickup and move move our robot over new colours around us and it will play sound.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "Connections in 3D Printing"
|
||||
date: "2024-12-31"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: []
|
||||
excerpt: "Credit: Sculpteo When creating objects for 3D printing, it’s sometimes hard to print the entire object at once. It helps to break it up into smaller pieces and put them together. But gluing pieces together can sometimes be tedious and challenging whe"
|
||||
featuredImage: "/images/resources/connections-in-3d-printing.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Sculpteo*
|
||||
|
||||
@@ -17,37 +17,23 @@ When creating objects for 3D printing, it’s sometimes hard to print the entire
|
||||
|
||||
Simple shape joints can be made by simply having male-to-female connectors 3D printed. You can find inspiration for connectors from woodworking joinery such as dovetails. Connecting these are simple as snapping the two parts together, using friction to hold the joint together.
|
||||
|
||||
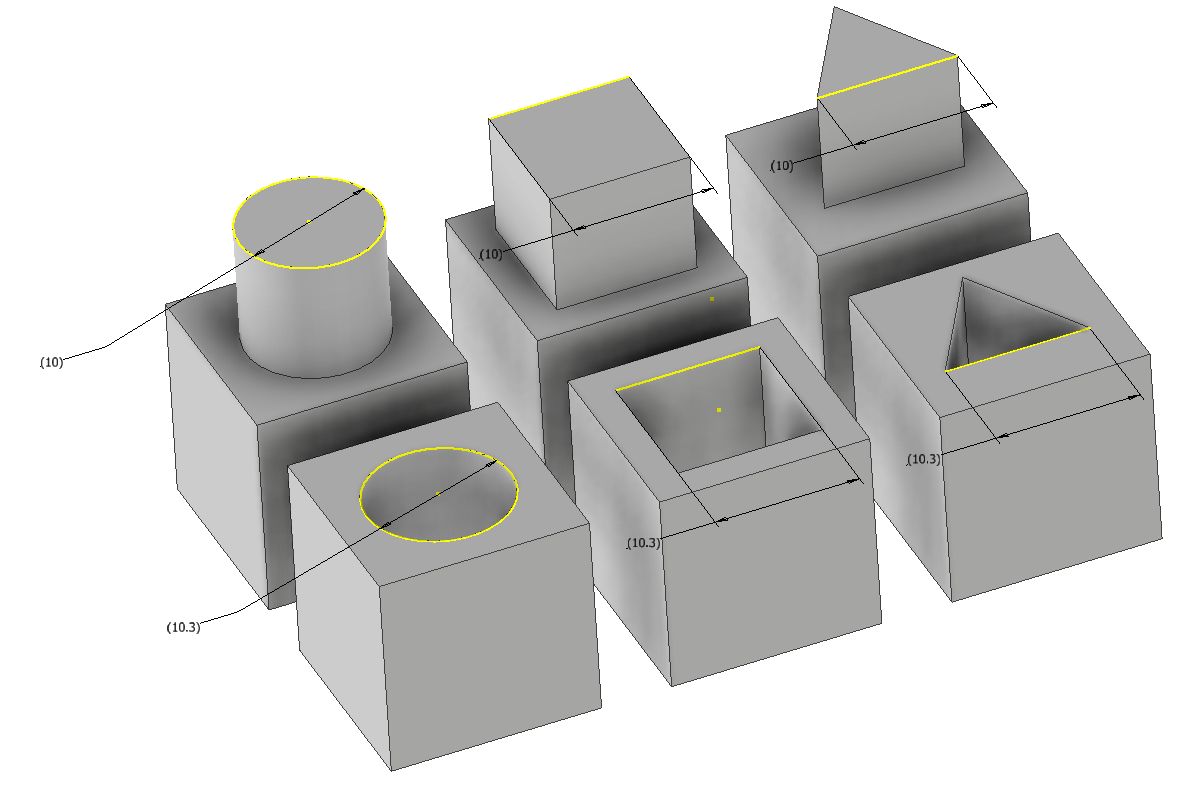
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Markforged*
|
||||
|
||||
It’s important to remember that printers do not print dimensions perfectly, so it helps to add a bit of tolerance. In connections like the ones above, it’s good to make the female connector slightly larger than the male connector. This is a trial and error process as each printer is different. In our experience, +0.3mm for a hole is a good place to start.
|
||||
|
||||
## Cons
|
||||
**Pros:** Simple to design, easy to print, easy to assemble
|
||||
|
||||
## Pros
|
||||
|
||||
---
|
||||
|
||||
- Somewhat breakable
|
||||
|
||||
- Lots of trial and error
|
||||
|
||||
- Weak connection
|
||||
|
||||
- Simple to design
|
||||
|
||||
- Easy to print
|
||||
|
||||
- Easy to assemble
|
||||
**Cons:** Somewhat breakable, lots of trial and error, weak connection
|
||||
|
||||
## Self-Tapping Screw Holes:
|
||||
|
||||
Adding appropriately sized holes to your design will allow you to add screws that will self-tap as they are screwed in. While normal circular holes work, a great way to implement self-tapping holes is to use the following design:
|
||||
|
||||
|
||||

|
||||
|
||||
- Create a circle the same size as your screw size (this dimension should be adjusted depending on your printer)
|
||||
|
||||
@@ -55,35 +41,23 @@ Adding appropriately sized holes to your design will allow you to add screws tha
|
||||
|
||||
- Apply a slight fillet to this triangle
|
||||
|
||||

|
||||

|
||||
|
||||
Once these holes are printed, screw a screw all the way in, which will apply thread to the inside of the hole. Remember, if the screw feels loose, make the dimension of the circle in step 1 a bit smaller.
|
||||
|
||||
### Cons
|
||||
**Pros:** Simple to design, easy to assemble, easy to print
|
||||
|
||||
### Pros
|
||||
**Cons:** Requires purchase of screws, weak connection
|
||||
|
||||
---
|
||||
## Threaded Inserts:
|
||||
|
||||
- Requires purchase of screws
|
||||
|
||||
- Weak connection
|
||||
|
||||
- Simple to design
|
||||
|
||||
- Easy to assemble
|
||||
|
||||
- Easy to print
|
||||
|
||||
## **Threaded Inserts:**
|
||||
|
||||
|
||||

|
||||
|
||||
*Credit: Joshua Vasquez - Threading 3D Printed Parts: How to Use Heat-Set Inserts*
|
||||
|
||||
Threaded inserts are the step up from self-tapping screw holes. These are a great way to add strong metal threads to screw holes in 3D prints. First, you must obtain threaded brass inserts for your desired screw size. These brass inserts can then be heated and gently pressed into a corresponding hole in your print. Once the insert is flush with the print’s surface, leave it to cool, and it will be held in place. We have outlined a basic technique below. However, a great resource is an extensive guide on heat-set inserts by Joshua Vasquez on Hackaday ([Link Here](https://hackaday.com/2019/02/28/threading-3d-printed-parts-how-to-use-heat-set-inserts/)).
|
||||
|
||||

|
||||

|
||||
|
||||
- Purchase threaded inserts for desired screw size (ID). Note the outer diameter (OD) of the insert (not the screw size)
|
||||
|
||||
@@ -97,61 +71,37 @@ Threaded inserts are the step up from self-tapping screw holes. These are a grea
|
||||
|
||||
- Once the metal is flush with the printed surface, hold it until the plastic and the insert cool down again.
|
||||
|
||||
## Cons
|
||||
**Pros:** Simple to design, very strong connection, easy to assemble, easy to print
|
||||
|
||||
### Pros
|
||||
|
||||
---
|
||||
|
||||
- Requires purchase of brass inserts and screws
|
||||
|
||||
- Can be time-consuming to insert into prints
|
||||
|
||||
- Simple to design
|
||||
|
||||
- Very strong connection
|
||||
|
||||
- Easy to assemble
|
||||
|
||||
- Easy to print
|
||||
**Cons:** Requires purchase of brass inserts and screws, can be time-consuming to insert into prints
|
||||
|
||||
## Print-In-Place:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Print-in-place is a technique for designing objects with moving components that do not require additional assembly. The idea is to design a single object in two unconnected and free-standing parts. If designed correctly, the part should hold together even when taken off the build plate. In the design above, the four wheels are printed with axles and can rotate about the axle without assembly.
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
As you can see in the wheel design, the axle inside is not actually touching the inner surface of the wheel. Still, the printer can print the axle and wheel without support. Furthermore, the wheel can’t slip off because of the angle between the axle and the wheel. This technique above is a great way to print-in-place wheels and axles.
|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Show above is a print-in-place hinge by mikeprusa. As seen in the gif, the hinge uses a technique similar to the wheels on the race car. This design, however, is printed in a different orientation. This technique can be used to create hinges in your parts. There are many other versions of print-in-place joints, but they can be very complex to design.
|
||||
|
||||
## Cons
|
||||
**Pros:** No assembly required
|
||||
|
||||
## Pros
|
||||
**Cons:** Difficult to design, difficult to print, joints can be breakable
|
||||
|
||||
---
|
||||

|
||||
|
||||
- Difficult to design
|
||||
|
||||
- Difficult to print
|
||||
|
||||
- Joints can be breakable
|
||||
|
||||
- No Assembly required
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
# Say Hi to Makerhero!
|
||||
|
||||
@@ -159,6 +109,4 @@ From filament, to repairs and spare parts. Micromelon has spent the last 6 years
|
||||
|
||||
We also own MakerHero, our very own 3D printing filament and parts brand.
|
||||
|
||||
[
|
||||
Buy MakerHero Filament and Parts
|
||||
](https://makerhero.com.au)
|
||||
[Buy MakerHero Filament and Parts](https://makerhero.com.au)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn iteration, branching, and how to use the buzzer and LEDs."
|
||||
featuredImage: "/images/resources/conversation-bot.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Use the input block to create a conversation between you and your rover. Use variables to save information in the conversation or ask the robot to do different tasks.
|
||||
|
||||
@@ -77,64 +76,6 @@ Use an IF statement to check whether the response is something we understand and
|
||||
|
||||
Add more responses to the IF statement as ELSE IF (ELIF) branches.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -17,7 +17,7 @@ Maze challenges are great cumulative activities for digital technologies classes
|
||||
|
||||
- How to build your student's knowledge throughout the term so they are ready to attempt maze assessments.
|
||||
|
||||

|
||||

|
||||
|
||||
### **What Skill Level Are Mazes Appropriate For?**
|
||||
|
||||
@@ -25,13 +25,9 @@ Mazes can be a great challenge for students of all skill levels. Maze complexity
|
||||
|
||||
### Possible Maze Unit Learning Objectives
|
||||
|
||||
**Branching, Iteration & Algorithm Design**
|
||||
**Branching, Iteration & Algorithm Design** To complete a maze, students will need to design an algorithm for their Rover. The algorithm will instruct the Rover how to handle path formations and maze challenges. Successful maze algorithms will require students to have a comprehensive understanding of branching and iteration. The more complex the maze, the more sophisticated the algorithm required to solve the maze will need to be. Maze algorithms will typically implement comprehensive branching logic using ** IF / Else / Else If** blocks and ** conditional operator (>, <, ==, !=)** blocks. Branching logic will often need to be repeated, this is done using a variety of** Loops**.
|
||||
|
||||
To complete a maze, students will need to design an algorithm for their Rover. The algorithm will instruct the Rover how to handle path formations and maze challenges. Successful maze algorithms will require students to have a comprehensive understanding of branching and iteration. The more complex the maze, the more sophisticated the algorithm required to solve the maze will need to be. Maze algorithms will typically implement comprehensive branching logic using **IF / Else / Else If **blocks and **conditional operator (>, <, ==, !=)** blocks. Branching logic will often need to be repeated, this is done using a variety of **Loops**.
|
||||
|
||||
**Understanding & Analysing Sensor Data**
|
||||
|
||||
Depending on maze complexity, there are a range of sensors students can use to solve challenges and optimize their algorithm. Most common mazes will require students to utilize the Rovers **ultrasonic**,** IR** and **colour sensors**. The **IR and ultrasonic sensors** will be used to detect the walls of the maze. The **colour sensors** are used to detect changes to floor colour e.g. to detect when the rover finds the finish point or an obstacle. More complex solutions may also make use of the **gyroscope**.
|
||||
**Understanding & Analysing Sensor Data** Depending on maze complexity, there are a range of sensors students can use to solve challenges and optimize their algorithm. Most common mazes will require students to utilize the Rovers ** ultrasonic**,** IR ** and** colour sensors**. The** IR and ultrasonic sensors ** will be used to detect the walls of the maze. The** colour sensors ** are used to detect changes to floor colour e.g. to detect when the rover finds the finish point or an obstacle. More complex solutions may also make use of the** gyroscope**.
|
||||
|
||||
You can create criteria that tests student’s ability to understand how the sensors generate their data and then organize and analyse this data. An example of an auxiliary objective might be for students to correctly have their rover determine how many left and right turns it made while solving the maze based on **gyroscope** data. To complete this, student’s need to understand how the gyroscope collects its data, what type of data that is and how to translate that data into useful information.
|
||||
|
||||
@@ -43,7 +39,7 @@ Mazes can be quite a complex task. It’s common for students to work in pairs o
|
||||
|
||||
Different maze configurations will offer different opportunities for students to engage digital technologies knowledge and understanding. The appropriate maze complexity is also necessary to allow students to demonstrate the necessary achievement standard for their year level band. Below are three examples of mazes with varying complexity.
|
||||
|
||||

|
||||

|
||||
|
||||
**Beginner**
|
||||
|
||||
@@ -59,7 +55,7 @@ The green rectangle is a coloured floor to signify the finish zone. Students nee
|
||||
|
||||
This maze requires an understanding of colour sensor data and more complex branching logic to handle the additional path formation and colour challenge.
|
||||
|
||||
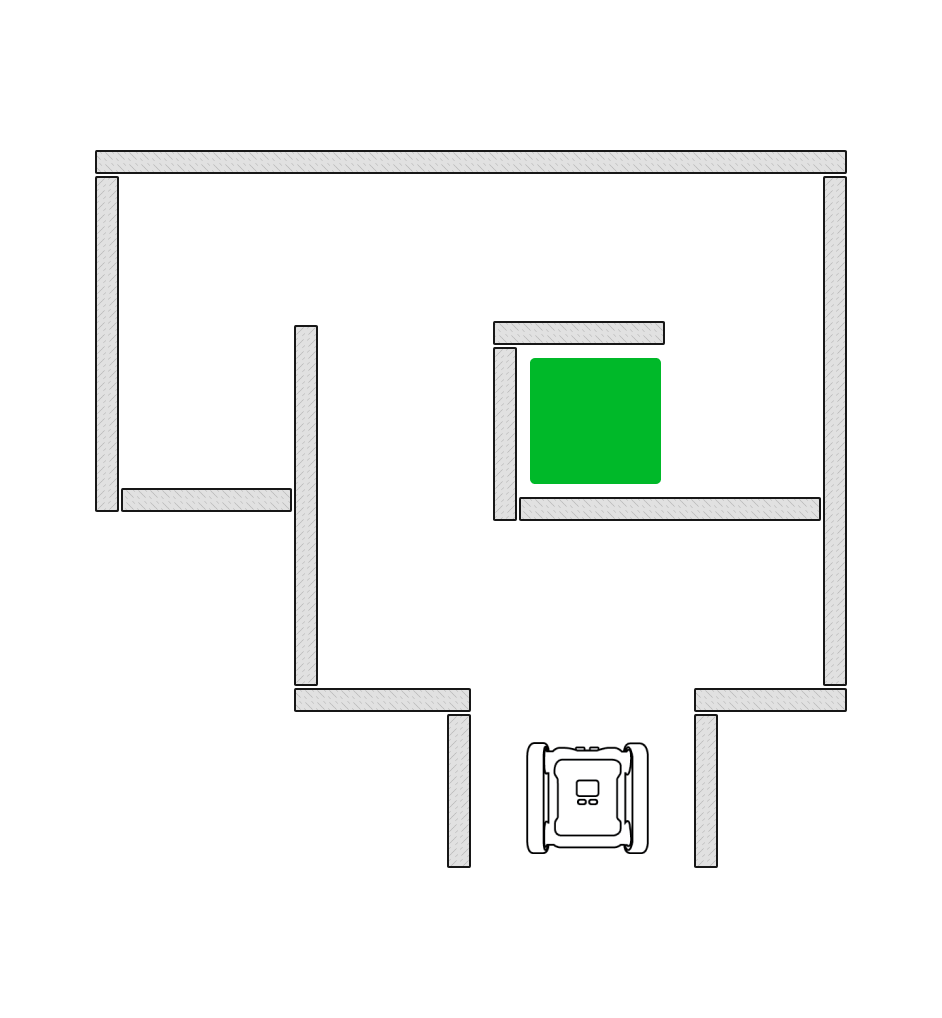
|
||||

|
||||
|
||||
**Advanced**
|
||||
|
||||
@@ -71,13 +67,13 @@ The blue zone acts as an additional maze objective. Rovers must enter the blue z
|
||||
|
||||
The addition of two new colour challenges will require more sophisticated branching logic relative to the intermediate maze.
|
||||
|
||||

|
||||

|
||||
|
||||
**Other Ways To Vary Maze Complexity**
|
||||
|
||||
You can increase complexity a variety of ways beyond what we’ve mentioned so far. Here’s a quick list of some other ways you can diversify maze exercises.
|
||||
|
||||

|
||||

|
||||
|
||||
- Having students keep a small object/s (e.g. a rubber duck pilot) balanced on top of their Rover. This makes it it imperative to not drive up walls and lose the passenger/s.
|
||||
|
||||
@@ -169,15 +165,13 @@ How you organize the lessons leading up to your maze assessment will change depe
|
||||
|
||||
The primary challenge of the maze is to navigate the path formations. To deal with these path formations, students will need to be familiar with how to program the Rover’s motors to move and turn the Rover.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Driving Shapes
|
||||
|
||||
[Read More](/resources/driving-shapes)
|
||||
|
||||
**Activity**
|
||||
|
||||
If your students have no knowledge of Micromelon Rover’s and how to program them, start with the activity **Driving Shapes**. This is a beginner activity which has students learn the basics of moving their Rover forwards and turning with the potential for some loop usage.
|
||||
**Activity** If your students have no knowledge of Micromelon Rover’s and how to program them, start with the activity ** Driving Shapes**. This is a beginner activity which has students learn the basics of moving their Rover forwards and turning with the potential for some loop usage.
|
||||
|
||||
More advanced way to control the motors will be necessary for completing the maze however this knowledge will be passively learnt when completing some of the other activities that we will cover when learning the about data and sensors.
|
||||
|
||||
@@ -185,7 +179,7 @@ More advanced way to control the motors will be necessary for completing the maz
|
||||
|
||||
Once students have a basic understanding of programming the Rover you can move onto incorporating sensors into some simple algorithms using branching and iteration. This will give students a chance to start getting familiar with incorporating branching and iteration into a single algorithm and also learning how to program the colour sensor. If you are using a maze with no colour based challenges, feel free to this step.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Basics Of Colour Sensor
|
||||
|
||||
@@ -197,17 +191,15 @@ This post will cover some of the science behind how the colour sensor works, the
|
||||
|
||||
If you’re limited on in class time, assign this post (and the other Basics Of posts) as homework reading before class.
|
||||
|
||||
**Activity**
|
||||
**Activity** The activities ** Stop on Colour** and ** Prison Escape** are great for learning how to implement sensor data into simple algorithms that use branching logic and iteration. Both of these activities require the using colour sensor. The complexity of algorithm necessary for completing these activities will not be as complicated as what is required for an efficient maze algorithm.
|
||||
|
||||
The activities **Stop on Colour** and **Prison Escape** are great for learning how to implement sensor data into simple algorithms that use branching logic and iteration. Both of these activities require the using colour sensor. The complexity of algorithm necessary for completing these activities will not be as complicated as what is required for an efficient maze algorithm.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Stop On Colour
|
||||
|
||||
[Read More](/resources/stop-on-colour-change)
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Prison Escape
|
||||
|
||||
@@ -221,13 +213,13 @@ The primary challenge of any maze is navigating the path formations. To move the
|
||||
|
||||
Knowing the science behind how the ultrasonic & IR sensors work provides students with a knowledge base that allows them to understand the limitations of the sensors and how to use them appropriately. We’ve written a post about each of these sensors that students can read to get familiar with the sensors.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Basics Of The IR Sensors
|
||||
|
||||
[Read More](/resources/ir-sensor)
|
||||
|
||||

|
||||

|
||||
|
||||
Basics Of The Ultrasonic Sensor
|
||||
|
||||
@@ -237,13 +229,13 @@ Basics Of The Ultrasonic Sensor
|
||||
|
||||
Puppy Bot and Lane Guidance activities both require distance sensing to complete successfully. Puppy Bot will make use of the Ultrasonic primarily and Lane Guidance will make use of the IR sensors. In their most basic form solutions for these activities will require students to understand how to use sensor data in conditional operators. They will also allow students to continue practicing how to use the IF / ELSE / ELSE IF blocks to create branching logic and Loops to repeat sections of code.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Puppy Bot
|
||||
|
||||
[Read More](/resources/puppy-bot)
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Lane Guidance
|
||||
|
||||
@@ -253,7 +245,7 @@ Puppy Bot and Lane Guidance activities both require distance sensing to complete
|
||||
|
||||
Once students are familiar with how to use all of the sensors required and are familiar with branching and iteration it’s a good time to start getting into a maze. This doesn’t have to be the final maze they are attempting but it may be an alternative version of the intended maze configuration or a less complex practice maze.
|
||||
|
||||
|
||||

|
||||
|
||||
Micromelon Robot Simulator
|
||||
|
||||
@@ -268,115 +260,3 @@ If you want to read more about how to get started with the Simulator [read this
|
||||
In this post we’ve covered what maze challenges are, what they teach, how to assess them and how to prepare our students for them. Hopefully from here you can incorporate a maze challenge into your digital technologies classroom.
|
||||
|
||||
If you’ve got any questions about running mazes challenges or about Micromelon Robotics please feel free to [reach out the Micromelon team](https://micromelon.com/contact.html?blog-maze-challenges).
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -17,7 +17,7 @@ Sumo is a great cumulative activity to run for digital technologies classes. Sum
|
||||
|
||||
- Building knowledge needed for sumo.
|
||||
|
||||

|
||||

|
||||
|
||||
### **What Skill Level Is Sumo Appropriate For?**
|
||||
|
||||
@@ -63,7 +63,7 @@ Sumo works well as an individual and team-based challenge. Having students work
|
||||
|
||||
### Setting Up For Sumo Battles
|
||||
|
||||
|
||||

|
||||
|
||||
To the right is an example diagram of a simple sumo setup. The grey circle is the sumo ring and the border for the sumo area. Inside the arena there are normally two rovers battling. The two rovers are in their default starting position, with backs facing the middle of the ring.
|
||||
|
||||
@@ -85,7 +85,7 @@ We recommend starting rovers back-to-back or side facing. Starting rover’s fac
|
||||
|
||||
The colour sensor will be the primary tool students can use to detect the sumo arena walls. Having the wall colour contrast the floor clearly will make it easier for the rover colour sensors to detect the wall. For example, white arena with a black line, or vice versa. This allows students to use the brightness of the line rather than actual colour making the process much simpler. For a challenge make a red or orange ring and let students explore out what works for them.
|
||||
|
||||

|
||||

|
||||
|
||||
Octagon shaped sumo arena made with masking tape on the floor making for a very cheap setup.
|
||||
|
||||
@@ -99,13 +99,10 @@ Octagon shaped sumo arena made with masking tape on the floor making for a very
|
||||
|
||||
We recommend that you establish your sumo rules before students start designing their algorithms as the rules will change how students create their algorithms. Here is our general ruleset for sumo and the same ruleset we use in the example sumo diagram depicted above. Feel free to copy or iterate on these rules to use it in your unit:
|
||||
|
||||
[
|
||||
DOWNLOAD RULES - PDF
|
||||
](/s/Sumo-Ruleset.pdf)
|
||||
[DOWNLOAD RULES - PDF](/s/Sumo-Ruleset.pdf)
|
||||
|
||||
[DOWNLOAD RULES - DOCX](/s/Sumo-Ruleset.docx)
|
||||
|
||||
[
|
||||
DOWNLOAD RULES - DOCX
|
||||
](/s/Sumo-Ruleset.docx)
|
||||
|
||||
**Sumo Battle Setup**
|
||||
|
||||
@@ -123,9 +120,7 @@ All competitors must start their code at the same time on the referee’s call.
|
||||
|
||||
- A rover is defeated when one of the following conditions are met:
|
||||
|
||||
It has been **knocked out**
|
||||
|
||||
- It has been **incapacitated**.
|
||||
It has been **knocked out **- It has been** incapacitated**.
|
||||
|
||||
- It is **disqualified** by the referee
|
||||
|
||||
@@ -135,7 +130,7 @@ The referee will remove rovers from the battle once they have been defeated.
|
||||
|
||||
When the majority of the rover’s is outside the arena. The referee decides when a knock has happened.
|
||||
|
||||

|
||||

|
||||
|
||||
**What is Incapacitation**
|
||||
|
||||
@@ -171,7 +166,7 @@ We like to make our prepared AI very difficult and so they act as a “final bos
|
||||
|
||||
### Expanding Sumo With 3D Printed Attachments
|
||||
|
||||

|
||||

|
||||
|
||||
Including 3D printed attachments in your sumo unit is a great way to give students more creative freedoms when designing their sumo algorithm. It can also offer opportunities to integrate an iterative design process and learn more about 3D printing as a manufacturing process into digital technologies classes. This can also provide an excellent introduction to manufacturing and industrial design concepts used in senior subjects.
|
||||
|
||||
@@ -195,7 +190,7 @@ Sumo algorithms also need to be efficient at correctly positioning and pushing o
|
||||
|
||||
In general, the more complex the sumo algorithm is, the more efficient it will be. However, this isn’t always true. Complex algorithms utilising many sensors may still move poorly in the ring and be easily defeated by a less complex algorithm. The difference between sumo and other digital technologies activities is that more advanced students are able to produce a less complex algorithm that is still very efficient. We don’t want to punish them for having a simple algorithm that is highly efficient.
|
||||
|
||||

|
||||

|
||||
|
||||
To the right you can see an example of a less complex but still efficient sumo rover from a workshop we ran at a school in Brisbane. The winning rover just moves forward slowly with the bigger attachment. This is definitely not a complex algorithm but regardless the student has demonstrated an understanding of how to counter the opponent rover and has created an efficient sumo rover.
|
||||
|
||||
@@ -255,19 +250,16 @@ It’s necessary to look at the code produced by students but also important not
|
||||
|
||||
Below is an example assignment sheet you can use your classroom. You can use this template as a starting point for designing your assessment. The ruleset we have outlined above is also included.
|
||||
|
||||
[
|
||||
DOWNLOAD ASSIGNMENT SHEET - DOCx
|
||||
](/s/Sumo-Assignment-Sheet-Rules.docx)
|
||||
[DOWNLOAD ASSIGNMENT SHEET - DOCx](/s/Sumo-Assignment-Sheet-Rules.docx)
|
||||
|
||||
[DOWNLOAD ASSIGNMENT SHEET - PDF](/s/Sumo-Assignment-Sheet-Rules.pdf)
|
||||
|
||||
[
|
||||
DOWNLOAD ASSIGNMENT SHEET - PDF
|
||||
](/s/Sumo-Assignment-Sheet-Rules.pdf)
|
||||
|
||||
### Building Knowledge Needed For Sumo
|
||||
|
||||
If students are not at the skill level yet to write a Sumo algorithm, we’ve outlined a general structure of how you can teach the skills required incrementally. Start at the step which feels most appropriate for how familiar your students are with coding in general and using the Micromelon Rover. These steps don’t have to be rigid lessons, you may cover multiple steps in a single lesson or delegate some tasks to homework. In the outline we will mention some potential activities you can run with your class, all of these activities can be run in the Micromelon Robot Simulator.
|
||||
|
||||

|
||||

|
||||
|
||||
Micromelon Robot Simulator
|
||||
|
||||
@@ -281,21 +273,19 @@ If you’re looking for information on how to get started with the Robot Simulat
|
||||
|
||||
The primary challenge of the maze is to navigate the path formations. To deal with these path formations, students will need to be familiar with how to program the Rover’s motors to move and turn the Rover.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Driving Shapes
|
||||
|
||||
[Read More](/resources/driving-shapes)
|
||||
|
||||
**Activity**
|
||||
|
||||
If your students have no knowledge of Micromelon Rover’s and how to program them, start with the activity **Driving Shapes**. This is a beginner activity which has students learn the basics of moving their Rover forwards and turning with the potential for some loop usage. You can run this activity from the **Free Roam** exercise in the robot simulator.
|
||||
**Activity** If your students have no knowledge of Micromelon Rover’s and how to program them, start with the activity ** Driving Shapes**. This is a beginner activity which has students learn the basics of moving their Rover forwards and turning with the potential for some loop usage. You can run this activity from the** Free Roam** exercise in the robot simulator.
|
||||
|
||||
**Step 2: Introducing The Colour Sensor, Branching and Iteration**
|
||||
|
||||
Once students have a basic understanding of programming the Rover you can move onto incorporating sensors into some simple algorithms using branching and iteration. This will give students a chance to start getting familiar with incorporating branching and iteration into a single algorithm and also learning how to program the colour sensor. Because the edge of the sumo arena will be detectable with the colour sensor this will be a very important step to cover as it will help students keep their rovers inside the arena.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Basics Of Colour Sensor
|
||||
|
||||
@@ -307,23 +297,15 @@ This post will cover some of the science behind how the colour sensor works, the
|
||||
|
||||
If you’re limited on in class time, assign this post (and the other Basics of posts) as homework reading before class. You can even ask questions at the start of the next lesson or get some students to present their findings.
|
||||
|
||||
**Activity**
|
||||
|
||||
The activities **Stop on Colour** and **Prison Escape** are great for learning how to implement sensor data into simple algorithms that use branching logic and iteration. Both of these activities are built into the Robot Simulator.
|
||||
**Activity** The activities ** Stop on Colour** and ** Prison Escape** are great for learning how to implement sensor data into simple algorithms that use branching logic and iteration. Both of these activities are built into the Robot Simulator.
|
||||
|
||||
The complexity of program necessary for completing these activities will be similar to the programming of a very basic sumo robot.
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/stop-on-colour-change)
|
||||
|
||||
#### Activity: Stop On Colour
|
||||
|
||||
[Read More](/resources/stop-on-colour-change)
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Prison Escape
|
||||
|
||||
@@ -337,23 +319,21 @@ A key part of any sumo algorithm is being able to locate the opponent in the rin
|
||||
|
||||
Knowing the science behind how the ultrasonic & IR sensors work provides students with a knowledge base that allows them to understand the limitations of the sensors and how to use them appropriately. We’ve written a post about each of these sensors that students can read to get familiar with the sensors.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Basics Of The IR Sensors
|
||||
|
||||
[Read More](/resources/ir-sensor)
|
||||
|
||||

|
||||

|
||||
|
||||
Basics Of The Ultrasonic Sensor
|
||||
|
||||
[Read More](/resources/ultrasonic-sensor)
|
||||
|
||||
**Activities**
|
||||
**Activities** Maze challenges require distance sensing to complete successfully. In their most basic form solutions for maze solving will require students to understand how to use sensor data in conditional operators. They will also allow students to continue practicing how to use the ** IF / ELSE / ELSE IF blocks** to create branching logic and ** Loops** to repeat sections of code.
|
||||
|
||||
Maze challenges require distance sensing to complete successfully. In their most basic form solutions for maze solving will require students to understand how to use sensor data in conditional operators. They will also allow students to continue practicing how to use the **IF / ELSE / ELSE IF blocks** to create branching logic and **Loops** to repeat sections of code.
|
||||
|
||||
|
||||

|
||||
|
||||
**Activity: Maze Solving**
|
||||
|
||||
@@ -363,7 +343,7 @@ Maze challenges require distance sensing to complete successfully. In their most
|
||||
|
||||
Once students are familiar with how to use all the sensors required and are familiar with branching and iteration it’s a good time to jump into sumo battles. Treat this as a time for students to start sparing and iterating on their sumo algorithms. No perfect algorithm was ever created in the first try. The more time students have to battle the more effective their sumo algorithms will become. If you’re using the robot simulator the students can practice their algorithms against the built in AI rovers.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity: Sumo
|
||||
|
||||
@@ -374,115 +354,3 @@ Activity: Sumo
|
||||
In this post we’ve covered what Sumo challenges are, what they teach, how to assess them and how to prepare our students for them. Hopefully from here you can incorporate Sumo into your digital technologies classroom.
|
||||
|
||||
If you’ve got any questions about running Sumo challenges or about Micromelon Robotics please feel free to [reach out the Micromelon team](https://micromelon.com/contact.html?blog-maze-challenges).
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -11,7 +11,7 @@ featuredImage: "/images/resources/dance-dance-rover-lution.png"
|
||||
|
||||
Let’s hold a dance contest in the classroom for rovers to compete in! Students can program the motors to perform dance moves, use LEDs and add sounds to add flair to their dance. Students are encouraged to use loops and functions to simplify their code. Points will be awarded to students who make good use of the rover’s tools and well written code.
|
||||
|
||||

|
||||

|
||||
|
||||
### Setup
|
||||
|
||||
@@ -19,7 +19,7 @@ When running this exercise we like to group students to create collaborative dan
|
||||
|
||||
### Here’s Our Approach
|
||||
|
||||

|
||||

|
||||
|
||||
Example code
|
||||
|
||||
@@ -34,61 +34,3 @@ Function blocks work in pairs. There is a block that holds all the instructions,
|
||||
#### **Stage 3**
|
||||
|
||||
From our start block we are going to add a loop block that runs twice. Inside the loop we will call the FancySpin function to run by adding the FancySpin block. This means all of the blocks inside of our FancySpin function will be played twice.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "Design Blog: Domino Layer"
|
||||
date: "2024-12-31"
|
||||
categories: ["Design Blog"]
|
||||
tags: ["Design Blog", "3D Printing"]
|
||||
categories: ["Design Blogs"]
|
||||
tags: ["Design Blogs", "3D Printing"]
|
||||
excerpt: "My name is Binara, and I will be taking you through the entire design process of how I created the domino layer attachment. The original task was to develop an attachment for the rover to store and lay dominos in patterns coded by the user. Step 1: R"
|
||||
featuredImage: "/images/resources/design-blog-domino-layer.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
My name is Binara, and I will be taking you through the entire design process of how I created the domino layer attachment. The original task was to develop an attachment for the rover to store and lay dominos in patterns coded by the user.
|
||||
|
||||
@@ -19,13 +19,13 @@ Every idea has to start somewhere, so the best way to get inspiration is to see
|
||||
|
||||
Here are some of the ideas I found out there for domino layers:
|
||||
|
||||

|
||||

|
||||
|
||||
Most of these designs have the same core concept. They store the dominoes in a stack and shift them to the ground one by one. While they are not identical, all the designs are similar.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -33,7 +33,7 @@ Most of these designs have the same core concept. They store the dominoes in a s
|
||||
|
||||
Now that we have a couple ideas, it’s time to plan out how you will tackle the problem. Sometimes sketches are a great way to get ideas down on paper, which helps to get an idea of the whole picture.
|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -41,13 +41,13 @@ Now that we have a couple ideas, it’s time to plan out how you will tackle the
|
||||
|
||||
Pick a design and get started on it! Depending on how you make your creations, this part will differ for many. I planned on using 3D printing to prototype my domino layer. To design the parts, I used Autodesk Inventor to visualise and slowly build a printable model.
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -63,7 +63,7 @@ While thousands of tiny changes may be made along the way, a new version isn’t
|
||||
|
||||
Here we’ve got the dominoes coming in from the top. The paddle spins around and knocks a domino down into a slide. The domino then slides down to a door on a servo. The door is needed to prevent the dominoes from falling over from the impact of hitting the ground.
|
||||
|
||||
|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -79,7 +79,7 @@ Notes to fix for the following design:
|
||||
|
||||
We’ve added a cut-out in the body to read the screen. Also, the door was changed entirely. It was noticed in the last design that dominoes may still fall over despite the door being closed. This new door can now squeeze a domino against itself to ensure it’s standing upright.
|
||||
|
||||

|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -95,9 +95,9 @@ Notes to fix for the following design:
|
||||
|
||||
This significant change removed the paddle and replaced it with a sliding mechanism that moved back and forth. When it comes forward, it pushes a domino into the slide. And when it pulls back, the next domino will fall into position.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
|
||||
@@ -1,19 +1,15 @@
|
||||
---
|
||||
title: "Design Blog: Fan Gecko"
|
||||
date: "2024-01-02"
|
||||
categories: ["Design Blog"]
|
||||
categories: ["Design Blogs"]
|
||||
tags: []
|
||||
excerpt: "My name is Binara, and I will be taking you through the entire design process of how I created the fan gecko attachment. The original task was to create a robot that can complete the Alpine robot challenge at RoboRAVE Australia. The challenge require"
|
||||
featuredImage: "/images/resources/design-blog-fan-gecko.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
My name is Binara, and I will be taking you through the entire design process of how I created the fan gecko attachment. The original task was to create a robot that can complete the Alpine robot challenge at RoboRAVE Australia. The challenge requires a robot to climb an 80° incline and deliver a flag to the summit. Further details about the challenge itself can be found on the RoboRAVE website:
|
||||
|
||||
[
|
||||
RoboRAVE Australia Challenges
|
||||
](https://roboraveaustralia.com/challenges/)
|
||||
My name is Binara, and I will be taking you through the entire design process of how I created the fan gecko attachment. The original task was to create a robot that can complete the Alpine robot challenge at RoboRAVE Australia. The challenge requires a robot to climb an 80° incline and deliver a flag to the summit. Further details about the challenge itself can be found on the RoboRAVE website:[RoboRAVE Australia Challenges](https://roboraveaustralia.com/challenges/)
|
||||
|
||||
---
|
||||
|
||||
@@ -23,13 +19,13 @@ Every idea has to start somewhere, so the best way to get inspiration is to see
|
||||
|
||||
As with the other design blogs, we will look into some existing designs. As there are not many existing alpine robots, research was put into wall climbing robots instead:
|
||||
|
||||

|
||||

|
||||
|
||||
Many of the existing designs rely on suction properties to stick to the walls, either using fans or suction cups. As the most common design for wall climbing seems to be fans, this is the technique that will be explored for the rover attachment.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -37,11 +33,11 @@ Many of the existing designs rely on suction properties to stick to the walls, e
|
||||
|
||||
As with most of my designs, the prototype phase consists of generating a 3D design on Autodesk Inventor or Fusion 360 and then 3D printing it. This project also deals with high-current applications so vigorous testing was done on all of the components before they were plugged in.
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -51,7 +47,7 @@ As with most of my designs, the prototype phase consists of generating a 3D desi
|
||||
|
||||
Prototype 1 has been labelled the ‘Spicy Sombrero’. The basic idea for this one is to use drone motors and propellors to create a thrust to push the robot down. Theoretically, when the robot starts climbing the wall, it will not fall backwards as the fan will push it into the wall. By increasing the normal force acting on the rover from the ramp, we hope to increase the friction force to give it better traction.
|
||||
|
||||

|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -69,7 +65,7 @@ For this design, the standard quadcopter propellor was replaced with 2 EDFs. The
|
||||
|
||||
To greatly optimise on mass and strength (as well as aesthetics), generative design was used to create the frame holding the fans. This is the part that undergoes the most force on the rover, so it has to be very strong, but still must be made as light as possible. Generative design is a technique where a generative model (sort of like an AI), creates a part given a set of prompts and conditions. They result in organic-looking objects like the part we made below:
|
||||
|
||||
|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -91,9 +87,9 @@ Realising that the tracks weren’t able to move the rover up the ramp, a sort o
|
||||
|
||||
To assist the rover in it’s climb to the summit, coding features used the gyro sensor to determine incline angle and required EDF thrust. The fans were also used to assist the rover in getting onto the ramp from the ground. A braking technique was used where the idle fan power served as a brace while the flag was being winched to the top. The colour sensors were used to locate the end of the ramp, and assisted with navigation on the summit.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Final design review:
|
||||
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "Design Blog: Ping-Pong Shooter"
|
||||
date: "2024-12-31"
|
||||
categories: ["Design Blog"]
|
||||
tags: ["Design Blog", "3D Printing", "Attachments"]
|
||||
categories: ["Design Blogs"]
|
||||
tags: ["Design Blogs", "3D Printing", "Attachments"]
|
||||
excerpt: "My name is Binara, and I will be taking you through the entire design process of how I created the ping pong shooter attachment. The original task was to develop an attachment for the rover to store and shoot ping-pong balls with automatic reloading."
|
||||
featuredImage: "/images/resources/design-blog-ping-pong-shooter.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
My name is Binara, and I will be taking you through the entire design process of how I created the ping pong shooter attachment. The original task was to develop an attachment for the rover to store and shoot ping-pong balls with automatic reloading.
|
||||
|
||||
@@ -19,11 +19,11 @@ Every idea has to start somewhere, so the best way to get inspiration is to see
|
||||
|
||||
As with the domino layer, we will explore existing designs of ping-pong shooters:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
The problem with these designs is that we’re constrained to using 2 servos, so flywheels are not an option. A system that automatically pulls back rubber bands and loads ping-pong balls could work, but it would also be complex. However, using elastic energy to shoot the balls might lead us in a good direction.
|
||||
|
||||
@@ -33,7 +33,7 @@ The problem with these designs is that we’re constrained to using 2 servos, so
|
||||
|
||||
It’s a good idea to get some of your thoughts and theories down on paper before building them.
|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -41,13 +41,13 @@ It’s a good idea to get some of your thoughts and theories down on paper befor
|
||||
|
||||
As with most of my designs, the prototype phase consists of generating a 3D design on Autodesk Inventor or Fusion 360 and then 3D printing it.
|
||||
|
||||
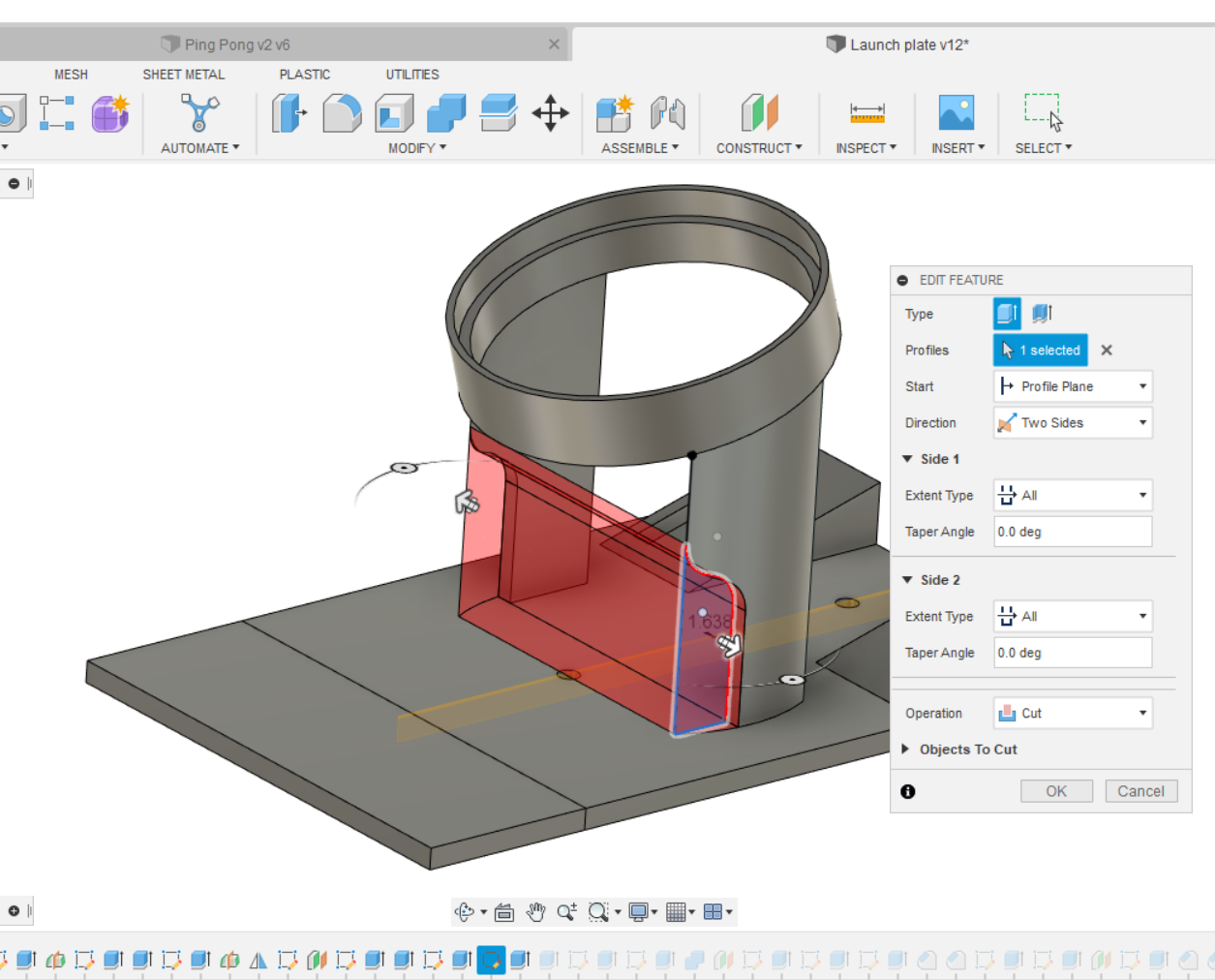
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
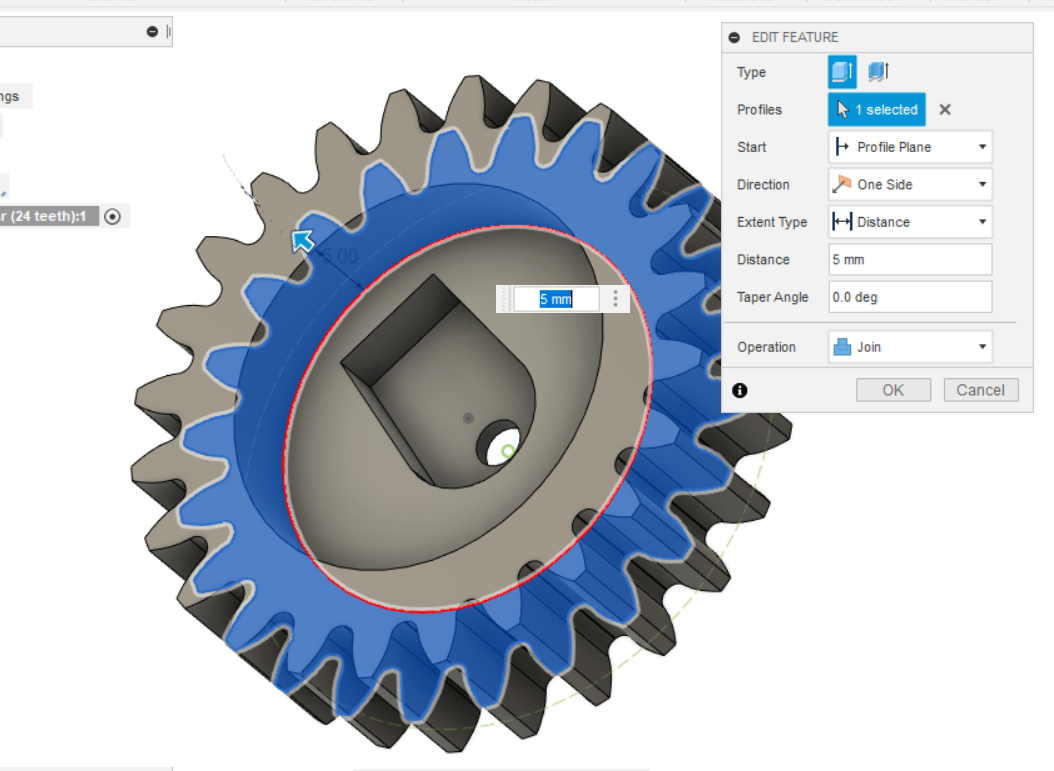
|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -57,11 +57,11 @@ As with most of my designs, the prototype phase consists of generating a 3D desi
|
||||
|
||||
This design has ping-pong balls dropping in from above. Then a servo-powered rack and pinion push the ball into ‘wings’ designed to squeeze and pop it out. The structure is made from PLA, but the wings are made using PETG, a much more flexible material. This makes it perfect for bending and squeezing the ball.
|
||||
|
||||

|
||||

|
||||
|
||||
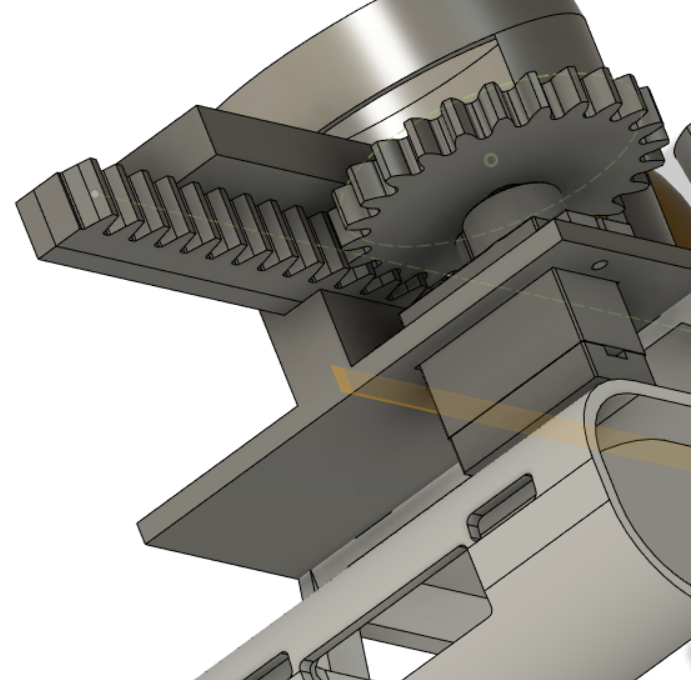
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -77,11 +77,11 @@ Notes to fix for the following design:
|
||||
|
||||
Now two servos on the back drive the same rack. The idea of this was to double the power of the ejection system. Throughout the structure, I’ve made some walls thicker, which reduced the chance of the prints breaking. Finally, at the front of the robot, there is an element on the roof that holds the wings in place. This stops them from flexing too much and popping out of their socket when a ball is pushed against them.
|
||||
|
||||

|
||||

|
||||
|
||||
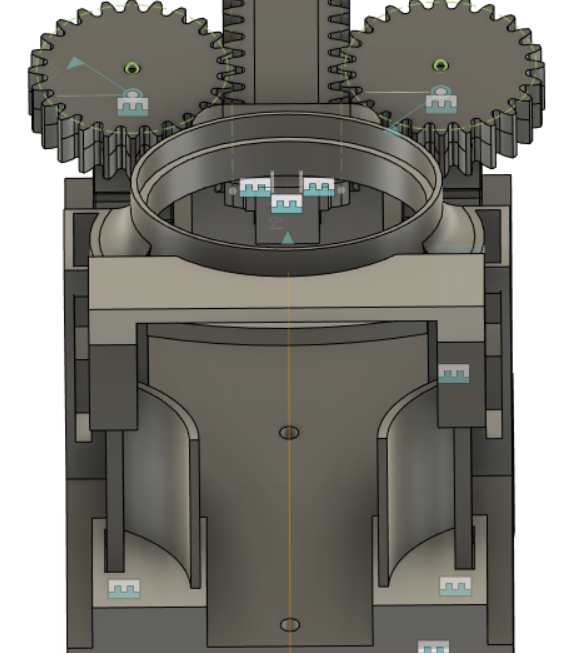
|
||||

|
||||
|
||||
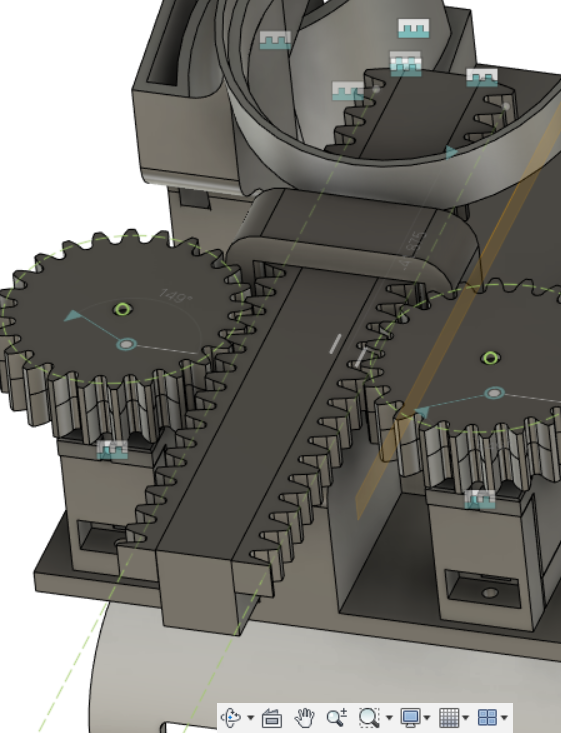
|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -99,11 +99,11 @@ The main issue in the previous design was that the rack jams when the servos pus
|
||||
|
||||
Next, two issues were solved in one: the roof detaching from the wings and the complexity of the prints. As you can see below, the roof was removed from the design and made to be screwed on instead. This allows all the design components to be printed without support, making it much more robust as it is assembled using screws.
|
||||
|
||||
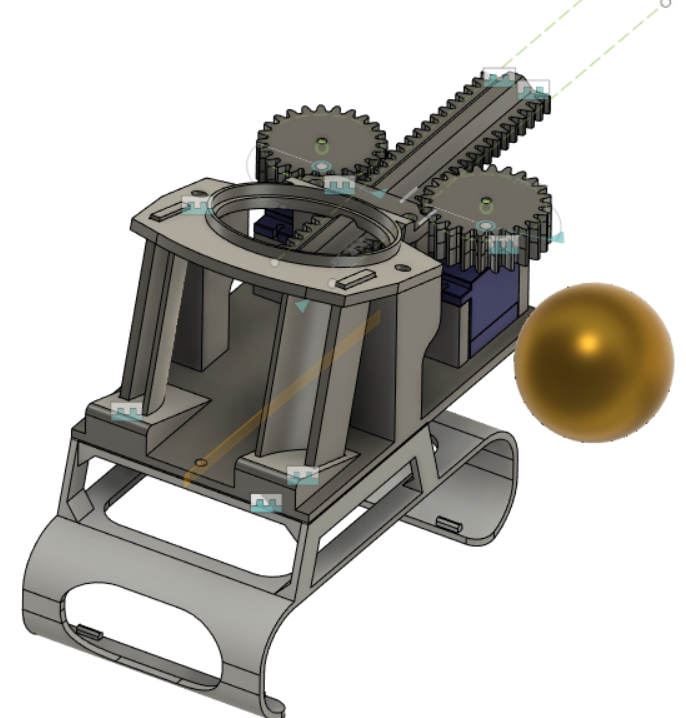
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
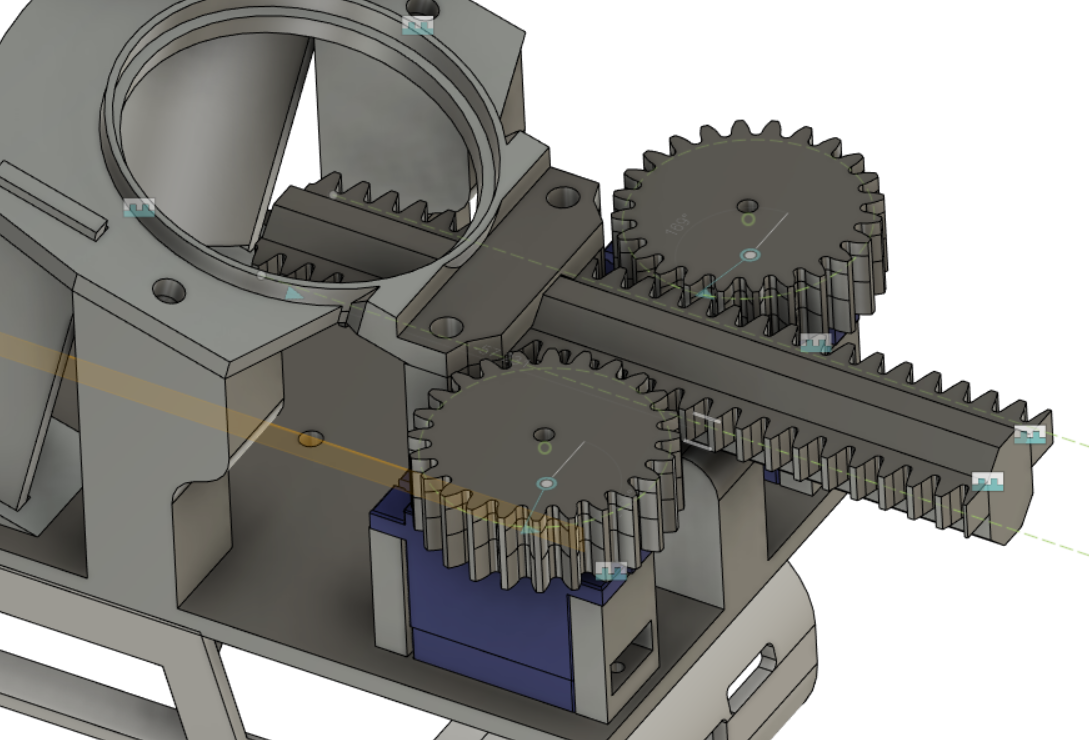
|
||||

|
||||
|
||||
Notes to fix for the following design:
|
||||
|
||||
@@ -121,11 +121,11 @@ Notes to fix for the following design:
|
||||
|
||||
After experiencing several issues with the pusher design, I went for a redesign and completely removed the rack and pinion. I made a new system with a continuous servo and a worm drive to get a lot of torque in the ejection system. These systems are known to vastly increase mechanical advantage. The shooting system slowly but powerfully pushes ping-pong balls through the new, stronger wings. This lets the system shoot really far.
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
Final design review:
|
||||
|
||||
@@ -151,8 +151,4 @@ And finally, after many, many iterations, the design works. Now all that’s lef
|
||||
|
||||
- **Aesthetic:** How does it look? Yes, we also enjoy looking at the finished product and thinking, ‘Wow, that looks awesome’. You could change the shape of the design to look more professional. Add a logo? Maybe coordinate the colour of your prints to make the appearance really pop.
|
||||
|
||||
If you want to build the final version of the Ping Pong Shooter yourself, click the link below and get printing!
|
||||
|
||||
[
|
||||
Build Guide: Ping Pong Shooter
|
||||
](https://micromelon.com.au/resources/build-guide-ping-pong-shooter)
|
||||
If you want to build the final version of the Ping Pong Shooter yourself, click the link below and get printing
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "Design Blog: Sumo Flipper"
|
||||
date: "2024-01-09"
|
||||
categories: ["Design Blog"]
|
||||
categories: ["Design Blogs"]
|
||||
tags: []
|
||||
excerpt: "My name is Binara, and I will be taking you through the entire design process of how I created the sumo flipper attachment. The original task was to create a unique solution for sumo battles. An additional condition is that the rover must not have an"
|
||||
featuredImage: "/images/resources/design-blog-sumo-flipper.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
My name is Binara, and I will be taking you through the entire design process of how I created the sumo flipper attachment. The original task was to create a unique solution for sumo battles. An additional condition is that the rover must not have any expansions (ie. extra microcontrollers, motors, or power sources).
|
||||
|
||||
@@ -19,15 +19,15 @@ Every idea has to start somewhere, so the best way to get inspiration is to see
|
||||
|
||||
The best way to research for sumo is to take a look at robots from many different battles, as well as looking into battlebot designs.
|
||||
|
||||

|
||||

|
||||
|
||||
Existing sumo robot design vary a great deal with some techniques being a great solution for some robots but a poor solution for others. Given this, there are still discernible trends among the winning robots. Looking at these designs, the robots try to have wheels with good traction and downforce to make sure it doesn’t slip.
|
||||
|
||||
Many of these robots also have a ramp at the front with the Maker’s Muse robot going so far as to have a lever arm at the front to flip other robots.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -35,9 +35,9 @@ Many of these robots also have a ramp at the front with the Maker’s Muse robot
|
||||
|
||||
As with most of my designs, the prototype phase consists of generating a 3D design on Autodesk Inventor or Fusion 360 and then 3D printing it.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
@@ -57,13 +57,13 @@ The first technique experimented was crafting custom wheels for the rover. While
|
||||
|
||||
This wheel has incredible grip and is very very soft. With this in use, a very large force is required for the robot to lose traction.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Crafty Arts*
|
||||
|
||||

|
||||

|
||||
|
||||
#### Clutch System:
|
||||
|
||||
@@ -71,11 +71,11 @@ The point of the silicone wheels is defeated if we simply have them free-rolling
|
||||
|
||||
With the confirmation that clutch bearings work, steel manufactured bearings were obtained with springs to assist the internal clutch. This version worked very well and was implemented into the design.
|
||||
|
||||

|
||||

|
||||
|
||||
3D printed clutch bearing design
|
||||
|
||||

|
||||

|
||||
|
||||
Steel roller clutch bearing alternative
|
||||
|
||||
@@ -87,9 +87,9 @@ The clutch system at the back was also attached to a lever as the wheels cannot
|
||||
|
||||
While the flipper could lift a kg, an issue we came across was that instead of lifting the opponent, the flipper would lift the rover off the ground instead. To combat this, the clutch system was located at the back to provide counterweight, but when the clutch wheels engage, they actually assist in partially lifting the robot off the ground, and descend even lower than the level of the tracks of the rover. This ensures that the rover still has maximum contact, even if it’s been lifted off the ground.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
|
||||
@@ -9,17 +9,11 @@ featuredImage: "/images/resources/driving-school-basics.png"
|
||||
|
||||
** **
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/robot-simulator)
|
||||
|
||||
Driving School is a virtual robot playground, with ducks, obstacles and traffic lights in the Micromelon Robot Simulator.
|
||||
|
||||
In Driving School Basics we program the rovers to stay in the centre of the lanes, while avoiding running over ducks and hitting other rovers.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -41,64 +35,6 @@ The simulator’s roads actually have a slight brightness gradient towards the e
|
||||
|
||||
Now we need to make sure we do not run into the duck! We can use our front ultrasonic sensor distance block to get our robot to wait for the duck to cross. It will also avoid other rovers now!
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn branching, variables maths, and motors."
|
||||
featuredImage: "/images/resources/driving-shapes-2.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program the rover to request a number from the user and drive in a shape with that many sides. For more advanced maths make the rover draw the shape with uneven length sides.
|
||||
|
||||
@@ -77,64 +76,6 @@ Once we have a number of sides we can create the code to draw our shape. We will
|
||||
|
||||
In each iteration of the loop we need to draw a side with movement blocks. We need to move forward and then turn by degrees. We can calculate how many degrees we need to turn each time a simple math operation. Divide 360 by our number of sides using a math operation block.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn iteration and how to control the Rover’s motors."
|
||||
featuredImage: "/images/resources/driving-shapes.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Learn to make your rover move and draw shapes with it. Start by making the rover drive in a square, then a triangle. Simplify your code with a loop and create more complex shapes like hexagons and octagons.
|
||||
|
||||
@@ -79,64 +78,6 @@ Use a repeat loop block and change the number to the number of sides in your sha
|
||||
|
||||
To draw different shapes, change the number of times the loop repeats and the number of degrees in a turn.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,15 +7,11 @@ excerpt: "Learn the fundamentals of 3D printing as a technology you can use in t
|
||||
featuredImage: "/images/resources/everything-to-know-about-3d-printing.jpeg"
|
||||
---
|
||||
|
||||
This post is designed to be a taster at how 3D printers work, don’t work and how they can be used in the classroom. This is the written version of a Professional Development Webinar Micromelon Robotics ran for teachers in 2022. Check out the events page to find out if there are other events coming up you might want to tune in for.
|
||||
|
||||
[
|
||||
Events Page
|
||||
](/events)
|
||||
This post is designed to be a taster at how 3D printers work, don’t work and how they can be used in the classroom. This is the written version of a Professional Development Webinar Micromelon Robotics ran for teachers in 2022. Check out the events page to find out if there are other events coming up you might want to tune in for.[Events Page](/events)
|
||||
|
||||
### How Do 3D Printers Work?
|
||||
|
||||
|
||||

|
||||
|
||||
The term “3D printing” encompasses several different technologies with their own benefits and drawbacks. We will mainly be discussing the currently most accessible and affordable 3D printer technology known as FDM (Fused Deposition Modeling). However, due to technological improvements and pricing reductions, resin LCD printers are also becoming a mainstay among hobbyists and schools alike.
|
||||
|
||||
@@ -69,11 +65,11 @@ The most significant advantage that 3D printers give us is quickly taking an ide
|
||||
|
||||
The process of taking your idea to the 3D printer can be broken down into 3 distinct parts: Designing, Slicing and finally, Printing.
|
||||
|
||||

|
||||

|
||||
|
||||
For students we often need to repeat this cycle a few times and in order to save class time, filament and failed designs, we normally start with ideation and sketching. Basically we follow the engineering design process, meaning we do lots of thinking and sketching at the start, before jumping into software to build our models, finally to print and evaluate where we went wrong.
|
||||
|
||||

|
||||

|
||||
|
||||
**3D Modelling and Design**
|
||||
|
||||
@@ -83,33 +79,33 @@ Once you have finalised and fleshed out your idea, you must first design it in s
|
||||
|
||||
The image on the left is an example of a spinning top that does not conform to this rule. We can see that this model will be impossible to print as there are no flat portions that can be placed on the printer bed. The image on the right shows a version of a spinning top that conforms to this rule. The handle has been made specifically so the spinning top can be placed upside down and printed with support.
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
#### *Rule: Try to minimise the number of features in your design that are not directly connected to something below it*
|
||||
|
||||
The image on the left is of a bracket with an overhanging portion on each side. For this to be printed in its current orientation, it would require support material between the bottom and top surfaces, which could be challenging to remove and leave a bad surface finish. The image on the Right shows the same bracket with the overhanging portions filled in, making it significantly easier to print.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
#### *Rule: If you must have something sticking out from your design, try to keep it at an angle of more than 45 degrees to avoid the need for supports.*
|
||||
|
||||
The image on the left is of a stopper meant to have an O-ring placed between the top and bottom ridges. For this to be printed in its current orientation, it would require support material between the bottom and top surfaces, leading to a reduced surface finish that could damage the O-ring. The image on the right is of the same stopper with a 45-degree angle added to the top surface. This now means that the stopper can be printed without the need for supports, ensuring a good surface finish.
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
#### *Rule: Due to the printing process, curves look best when orientated in the x and y-axis.*
|
||||
|
||||
The image on the left is of a design with a curved portion pointing upwards. Due to the way that 3D printers slice models for printing, this curve will end up being made of layers with a height equal to the selected layer height. This will cause the curve to become less defined and to look more like steps. To avoid this, you should design your parts to be orientated with significant curves on either the x or y-axis. This is because the resolution of the x and y axises significantly better than the layer height. This can be seen in the image to the right, where the component is laid on its side.
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
**Slicing**
|
||||
|
||||
@@ -123,7 +119,7 @@ This is where you take your design to the printer. This can be done in one of se
|
||||
|
||||
Although 3D printers are fantastic pieces of technology that help us turn our designs into physical objects, they are still a complex piece of technology with many things that can go wrong. No matter how good the printer is, it is still susceptible to failure.
|
||||
|
||||
|
||||

|
||||
|
||||
Image Credit: Prusa Research a.s.
|
||||
|
||||
@@ -147,152 +143,32 @@ Suppose your printer supports printing in multiple materials using multiple extr
|
||||
|
||||
So, supports are a double-edged sword. On the one hand, we can print whatever we want, regardless of its features. On the other hand, we now need to contend with potentially extensive post-processing, longer print times and diminished surface finish.
|
||||
|
||||

|
||||

|
||||
|
||||
# 3D Printing in Industry
|
||||
|
||||
3D printers have been highly influential in how engineers work worldwide. Gone are the days when complex prototypes must be set off to be manufactured over days or weeks. Industrial designers and engineers can design, analyse and refine quicker than ever before because the parts can be printed in house, evaluated, and decisions made without needing external partners. Even things as simple as TV remotes can be printed, felt in the designer’s hand and changes sometimes made within the same workday.
|
||||
|
||||

|
||||

|
||||
|
||||
Here at Micromelon, we have been using 3D printers to prototype our robots since 2017 and before that to help with Uni projects and other companies products. We used 3D printing to sell our first products, refine our designs and upgrade different parts of our robots based on direct customer feedback and prototyping. 3D printing enabled us to evaluate and refine before we were ready to order thousands of robot shells at a time.
|
||||
|
||||
|
||||

|
||||
|
||||
A great example of this taken to the extremes is with NASA. In 2014, NASA sent the first 3D printer, the ReFabricator, to the International Space Station, which was an FDM printer using very similar technology to what we have in classrooms today. This printer enables designers on earth to design tools and parts required for the ISS to be printed in space and used. It was also the first 3D printer to break down old prints and reuse the material to create new parts.
|
||||
|
||||

|
||||

|
||||
|
||||
Finally, 3D printers have allowed people to make entire businesses based on customisation and designing parts for their hobbies. Whether it’s someone adding a cup holder to their own car or creating custom cup holders for a whole range of vehicles, 3D printing has given people the ability to customise anything and everything. Where usually you’d need a large market to sell a product, with 3D printing, you can design the part, print, and sell only a few, and it can still be worthwhile. A whole industry on Etsy and other online marketplaces has been created based on this premise. If the thing you need doesn’t exist, thousands of people who 3D model and print for a living are willing to design a part just for you.
|
||||
|
||||
So that is a crash course on 3D Printing. There is lots of content we purposely didn’t include in this blog post because it could honestly be a whole book. Things like which 3D Printers are best for classrooms, where I download models from, how I store my filament and how do I manage 30 or more students all wanting to print their new design at once are all great questions and ones that are best handled in a video call or meeting with some of our 3D printing experts at Micromelon. If this is you feel free to reach out via our contact form and we’ll be more than happy to support you on your 3D Printing journey.
|
||||
So that is a crash course on 3D Printing. There is lots of content we purposely didn’t include in this blog post because it could honestly be a whole book. Things like which 3D Printers are best for classrooms, where I download models from, how I store my filament and how do I manage 30 or more students all wanting to print their new design at once are all great questions and ones that are best handled in a video call or meeting with some of our 3D printing experts at Micromelon. If this is you feel free to reach out via our contact form and we’ll be more than happy to support you on your 3D Printing journey.[Contact Us!](/contact)
|
||||
|
||||
[
|
||||
Contact Us!
|
||||
](/contact)
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
# Say Hi to Makerhero!
|
||||
|
||||
From filament, to repairs and spare parts. Micromelon has spent the last 6 years working with schools, businesses and individuals to repair, maintain and print great things. We run 3D printing training and webinars to the public focused around using 3D printers safely around students at schools, robotics clubs and at home.
|
||||
|
||||
We also own MakerHero, our very own 3D printing filament and parts brand.
|
||||
|
||||
[
|
||||
Buy Makerhero Filament and Parts
|
||||
](https://makerhero.com.au)
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
We also own MakerHero, our very own 3D printing filament and parts brand.[Buy Makerhero Filament and Parts](https://makerhero.com.au)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn branching, iteration, and how to use the accelerometer."
|
||||
featuredImage: "/images/resources/flip-bot.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program the rover to flip itself upside down and then stop. There are many solutions to this problem. The rover must flip itself without being touched while running and once it has flipped it should stop. You could try combining this with the Turn Over Rover program to include lights.
|
||||
|
||||
@@ -79,64 +78,6 @@ Add a repeat block where the condition is a sensor block that checks if the rove
|
||||
|
||||
After the loop that waits for the robot to flip we add a motor block to stop the rover.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How to Use UART "
|
||||
date: "2024-12-12"
|
||||
categories: ["Guides"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: ["Advanced", "Python"]
|
||||
excerpt: "UART (universal asynchronous receiver transmitter) is a hardware communication protocol between two devices. The Micromelon Rover features an expansion header that can be used to connect external devices, such as an Arduino or an IR sensor. This guid"
|
||||
featuredImage: "/images/resources/getting-started-the-micromelon-rover-uart.png"
|
||||
@@ -11,7 +11,7 @@ UART (universal asynchronous receiver transmitter) is a hardware communication p
|
||||
|
||||
This guide will outline how the UART protocol works, how it is implemented in the Rover and how to connect a device to the Rover using UART.
|
||||
|
||||

|
||||

|
||||
|
||||
## What is UART?
|
||||
|
||||
@@ -35,7 +35,7 @@ The **start bit** is held high until data is ready to be sent and then set low.
|
||||
|
||||
## Hardware Setup
|
||||
|
||||

|
||||

|
||||
|
||||
Connecting two devices through the UART protocol requires two wires. This allows data to both be received and transmitted by both devices. Each device's RX (receive) pin must be connected to the other's TX (transmit) pin. Additionally, a shared ground is needed between both devices.
|
||||
|
||||
@@ -71,10 +71,6 @@ For a Python implementation, refer to the Open MV UART guide.
|
||||
|
||||
For a C++ and Arduinio implementation, refer to the Arduinio UART guide.
|
||||
|
||||
[
|
||||
Getting Started with Open MV and the Micromelon Rover
|
||||
](getting-started-with-open-mv-and-the-micromelon-rover)
|
||||
[Getting Started with Open MV and the Micromelon Rover](getting-started-with-open-mv-and-the-micromelon-rover)
|
||||
|
||||
[
|
||||
Getting Started with Arduino and the Micromelon Rover
|
||||
](xb3xasp6iz9s5gwqqo5anvcd0lwd1l)
|
||||
[Getting Started with Arduino and the Micromelon Rover](/resources/getting-started-with-arduino)
|
||||
|
||||
@@ -4,12 +4,12 @@ date: "2024-02-07"
|
||||
categories: ["Getting Started"]
|
||||
tags: []
|
||||
excerpt: "The Micromelon Rover comes with an expansion header that allows for the connection of various additional devices. This guide will outline how to connect an Arduino Uno and use it to control the Rover via UART. Hardware Setup First, the R"
|
||||
featuredImage: "/images/resources/xb3xasp6iz9s5gwqqo5anvcd0lwd1l.jpg"
|
||||
featuredImage: "/images/resources/getting-started-with-arduino.jpg"
|
||||
---
|
||||
|
||||
The Micromelon Rover comes with an expansion header that allows for the connection of various additional devices. This guide will outline how to connect an Arduino Uno and use it to control the Rover via UART.
|
||||
|
||||

|
||||

|
||||
|
||||
## Hardware Setup
|
||||
|
||||
@@ -17,15 +17,13 @@ First, the Rover’s RX and TX pins must be connected to the Arduino. Software s
|
||||
|
||||
In this guide, pins A0 and A1 will be used for this. However, any pair of GPIO pins can be used. The Rover’s header pinout and an example wiring diagram can be seen below:
|
||||
|
||||
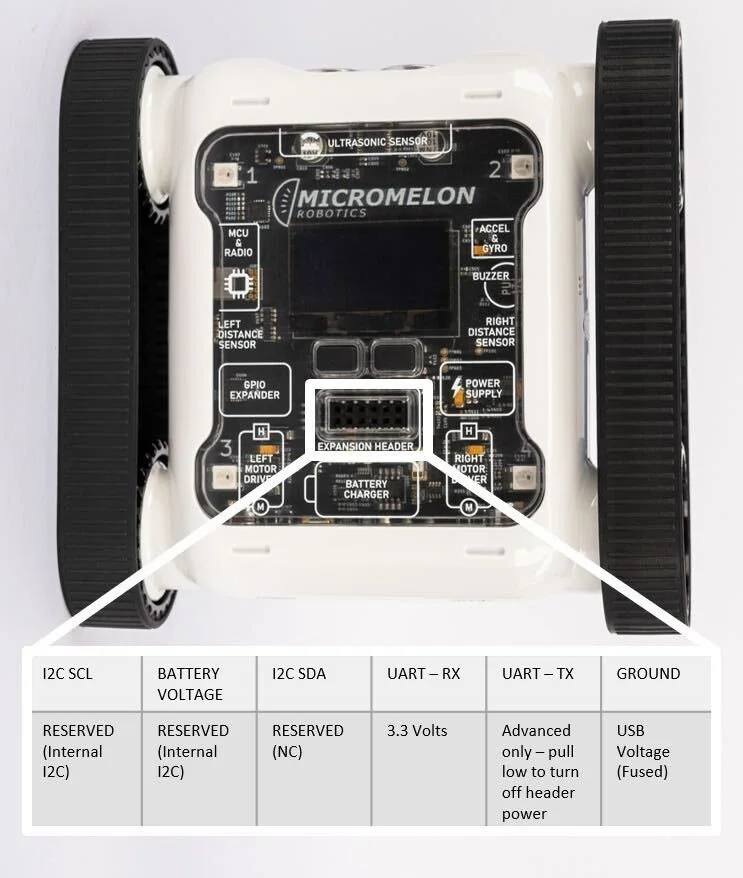
|
||||

|
||||
|
||||
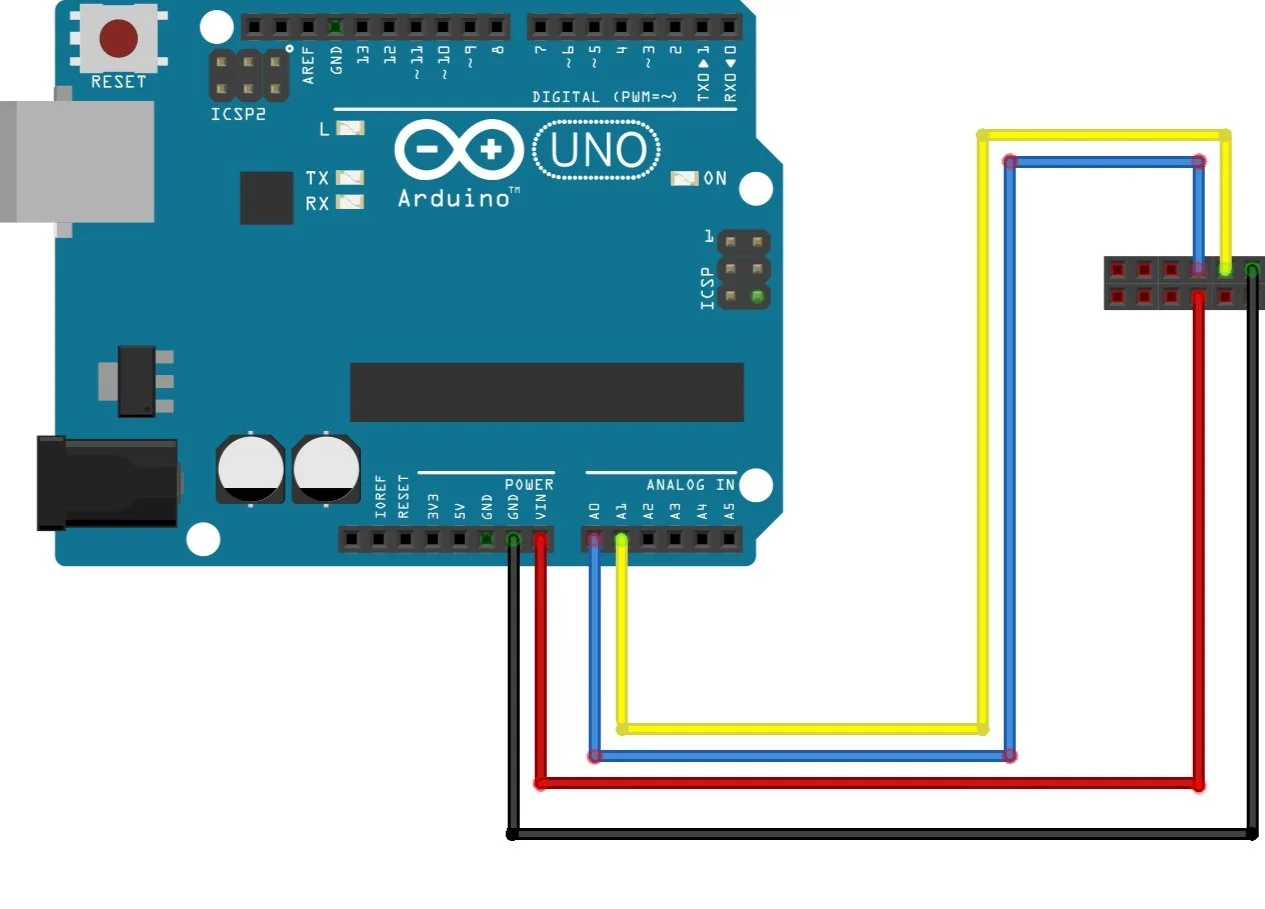
|
||||

|
||||
|
||||
## Rover UART Initialisation
|
||||
|
||||
```
|
||||
`When programming the Arduino, the Arduino IDE is the easiest-to-use development environment. It has a lot of included libraries which will make sending UART packets much more straightforward, and everything can be kept inside a single file. All of the code for this project can be stored in an Arduino sketch (.ino file), which can be created using the Arduino IDE.`
|
||||
```
|
||||
When programming the Arduino, the Arduino IDE is the easiest-to-use development environment. It has a lot of included libraries which will make sending UART packets much more straightforward, and everything can be kept inside a single file. All of the code for this project can be stored in an Arduino sketch (.ino file), which can be created using the Arduino IDE.
|
||||
|
||||
When working with Arduino sketches, there must be both a setup and a main function. The specifics of what goes in each will be explained later, but the setup function runs once at the program’s start. After this, the loop function will run until the program ends. Typically the setup function would be written before the loop function.
|
||||
|
||||
@@ -92,7 +90,7 @@ void setup() {
|
||||
|
||||
Uploading this code to the Arduino should cause the Rover to enter the required “Expansion Mode”. To check if this has been done, the Rover’s LCD should read “Expansion Mode”, where the bot ID used to be.
|
||||
|
||||
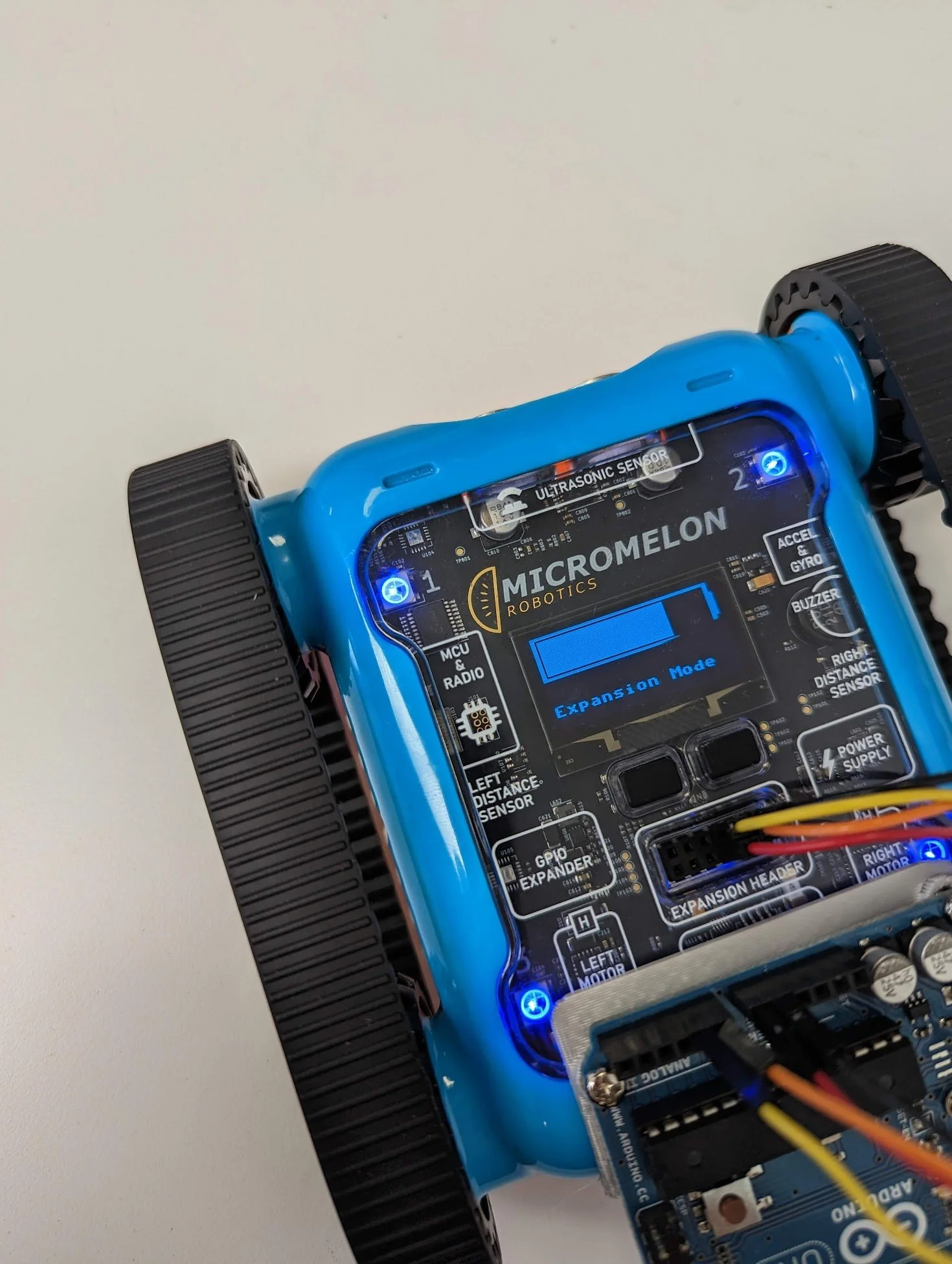
|
||||

|
||||
|
||||
## Sending Rover Commands
|
||||
|
||||
@@ -1,47 +1,38 @@
|
||||
---
|
||||
title: "How to Connect and Control the Micromelon Rover with OpenMV"
|
||||
date: "2024-12-11"
|
||||
categories: ["Guides"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: []
|
||||
excerpt: "The Micromelon Rover comes with an expansion header that allows for the connection of various additional devices. In this guide, we will show you how to connect an OpenMV and use it to control the Rover via the UART. Our goal is to have the Rover det"
|
||||
featuredImage: "/images/resources/getting-started-with-open-mv-and-the-micromelon-rover.png"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
The Micromelon Rover comes with an expansion header that allows for the connection of various additional devices. In this guide, we will show you how to connect an OpenMV and use it to control the Rover via the UART. Our goal is to have the Rover detect objects using the OpenMV and drive towards them.
|
||||
|
||||
If you're not familiar with UART, please refer to the “How to use UART” guide:
|
||||
|
||||
[
|
||||
How to use UART
|
||||
](getting-started-the-micromelon-rover-uart)
|
||||
If you're not familiar with UART, please refer to the “How to use UART” guide:[How to use UART](getting-started-the-micromelon-rover-uart)
|
||||
|
||||
## Hardware Setup
|
||||
|
||||
For the hardware setup, you will need to connect the Rover’s RX and TX pins to the OpenMV. You will also need to connect the 3.3V and GND pins to power the device. You can find the Rover’s header pinout and an example wiring diagram below:
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
To attach the OpenMV to the rover, head over to Printables or Thingiverse, and download the OpenMV clip for the rover. To assemble, simply use 2 M3 (8 - 10mm), and screw the OpenMV onto the clip. Then, click the clip onto the front of the rover.
|
||||
|
||||
[
|
||||
Printables: OpenMV Clip
|
||||
](https://www.printables.com/model/639389-micromelon-openmv-attachment)
|
||||
[Printables: OpenMV Clip](https://www.printables.com/model/639389-micromelon-openmv-attachment)
|
||||
|
||||
[Thingiverse: OpenMV Clip](https://www.thingiverse.com/thing:6284234)
|
||||
|
||||
[
|
||||
Thingiverse: OpenMV Clip
|
||||
](https://www.thingiverse.com/thing:6284234)
|
||||
|
||||
## Rover UART Initialisation
|
||||
|
||||
```
|
||||
`When programming the OpenMV, we recommend using the OpenMV IDE. It has built-in camera calibration functionality and makes it easy to flash the OpenMV. Since the OpenMV is programmed using MicroPython, you can store all the code for this project in a Python file inside the IDE. The MicroPython documentation provides a good overview of many of the libraries that will be used.
|
||||
When programming the OpenMV, we recommend using the OpenMV IDE. It has built-in camera calibration functionality and makes it easy to flash the OpenMV. Since the OpenMV is programmed using MicroPython, you can store all the code for this project in a Python file inside the IDE. The MicroPython documentation provides a good overview of many of the libraries that will be used.
|
||||
|
||||
Whenever you're working with OpenMV Python files, the code has three key elements. The first step is to import any necessary libraries, constants, and global variables. By default, the sensor, image, and time libraries will be imported. You will also need to import the pyb library, which gives you the ability to use specific device functionality, such as sending UART packets.`
|
||||
```
|
||||
Whenever you're working with OpenMV Python files, the code has three key elements. The first step is to import any necessary libraries, constants, and global variables. By default, the sensor, image, and time libraries will be imported. You will also need to import the pyb library, which gives you the ability to use specific device functionality, such as sending UART packets.
|
||||
|
||||
```
|
||||
import sensor, image, time
|
||||
@@ -90,11 +81,11 @@ def arm_rover(state):
|
||||
|
||||
Uploading this code to the Arduino should cause the Rover to enter the correct mode. You will know it worked if the Rover's LCD reads "Expansion Mode" where the bot ID used to be.
|
||||
|
||||
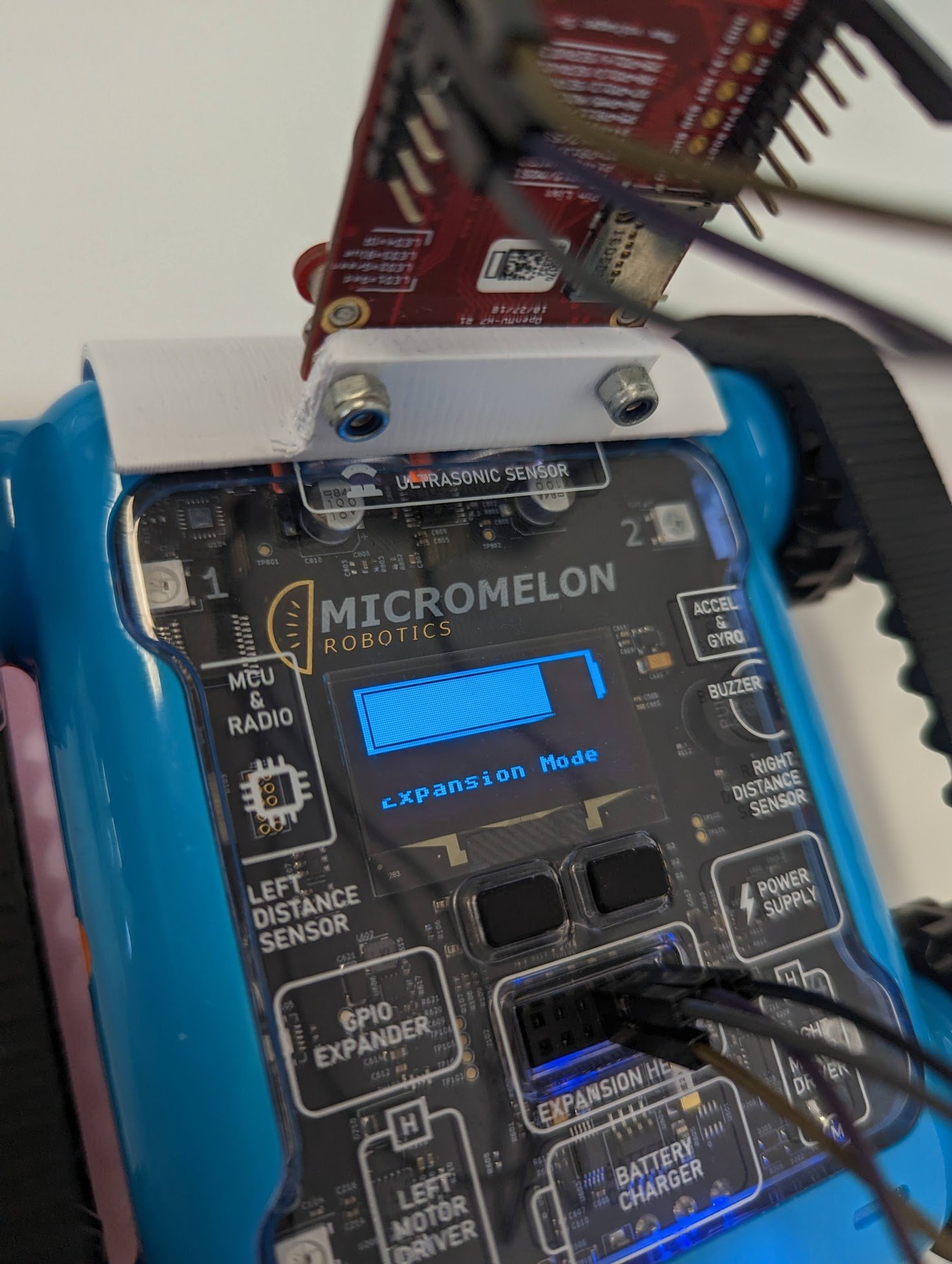
|
||||

|
||||
|
||||
## **OpenMV Setup**
|
||||
|
||||

|
||||

|
||||
|
||||
Now that the Rover is ready to receive commands over UART, let's set up the OpenMV. When mounting the OpenMV for object tracking, a slight downward angle is useful. You can use the Micromelon 3D printed mount for this purpose.
|
||||
|
||||
@@ -222,7 +213,7 @@ Using this threshold, we can then track objects of this colour using OpenMV’s
|
||||
|
||||
To initialise the camera, the following code can be used.
|
||||
|
||||

|
||||

|
||||
|
||||
```
|
||||
sensor.reset() # Reset and initialise the sensor
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "Getting Started With Proportional Control On A Micromelon Rover"
|
||||
date: "2022-11-16"
|
||||
categories: ["All"]
|
||||
categories: ["All", "Advanced Guides"]
|
||||
tags: ["Guides"]
|
||||
excerpt: "Learn about proportional control."
|
||||
featuredImage: "/images/resources/getting-started-with-proportional-controls.png"
|
||||
@@ -25,7 +25,7 @@ All a proportional controller does is increase or decrease our output (water com
|
||||
|
||||
You could in this example consider the difference in moisture from the ground to what the plant needs to be our “**error **”, and one more piece of our control system recipe is our** proportional gain**, commonly denoted as “Kp”. This is a simple multiplier that gets applied to our entire system, so that we can apply the same control system on a thirstier plant like cucumber with a Kp of something like 2 (meaning we double the water outputs) and reduce the water outputs with a kp of 0.5 if we are growing a cactus (meaning we halve the water outputs)
|
||||
|
||||

|
||||

|
||||
|
||||
Control systems are so popular because this will deal with changes in circumstances and automates a lot of the work that would go into managing this garden. Did it rain last night? Moisture sensor will give the input that we have a lot of water in the soil, and will appropriately limit or turn off the sprinkler system because it has recognised it already has plenty of water. Has it been a particularly hot day? Moisture sensor will let the system know the ground is drier than usual and the sprinklers can be programmed to stay on for longer, all of which can be scaled for different plants using our Kp values for different water requirements.
|
||||
Less people would be required to manage a larger garden if a control system can ensure people don’t have to spend time worrying about these things.
|
||||
@@ -62,7 +62,7 @@ Let’s say the car drops to a speed of 75km/h due to aforementioned effects. Th
|
||||
|
||||
This is where we can use our Kp value to define exactly how drastically our system should respond to this error. A Kp value that is too high will result in the cruise controller to add an unreasonable amount of gas usage, meaning we will almost certainly greatly overshoot our goal of 80km/h, at which point we suddenly need to use the brakes to get back to our goal, but with a Kp too high we will likely slow down too much because our responses are too drastic and it will take a while before we finally get to our goal. A Kp too small may not be suitable either. If the Kp increases the gas by too little, we may only be able to reach a speed of 77km/h because the system will not make a change that is great enough for us to reach 80km/h.
|
||||
|
||||

|
||||

|
||||
|
||||
Figure 1: System response of a high Kp vs a low Kp
|
||||
|
||||
@@ -71,7 +71,7 @@ Figure 1: System response of a high Kp vs a low Kp
|
||||
By now we’ve seen an application with cruise control, but you could control almost any action the robot does based on any of the available inputs. You could vary the speed of the rover’s wheels based on its colour sensors, ultrasonic sensors, gyro sensor, etc. You could even combine multiple inputs and have them control one or multiple outputs.
|
||||
Let’s do a very simple example first of changing speed based on ultrasonic sensor distance.
|
||||
|
||||

|
||||

|
||||
|
||||
Figure 2: Simple proportional control example
|
||||
|
||||
@@ -85,13 +85,13 @@ This very small snippet of code essentially behaves like a proportional controll
|
||||
|
||||
**Kp:** This program does not have a Kp, so it can be thought of as 1 as we are not scaling our speed based on our distance in this example just yet. If we wanted to move at half the speed of our ultrasonic sensor, then instead of simply inserting the ultrasonic sensor distance, we could do 0.5 * ultrasonic distance, meaning our Kp is 0.5.
|
||||
|
||||

|
||||

|
||||
|
||||
Figure 3: Example showing implementation of Kp = 0.5
|
||||
|
||||
This is also largely because we have changed our goal along with our Kp value. The goal is to now move at half of our sensor distance.
|
||||
|
||||

|
||||

|
||||
|
||||
Figure 4: Proportional control example
|
||||
|
||||
@@ -104,27 +104,27 @@ This example also shows a lot more intelligent defensive programming. This means
|
||||
|
||||
## **Let’s Break It Down:**
|
||||
|
||||

|
||||

|
||||
|
||||
- For these first two blocks we can define how far away from objects we’d like to stop, and what our Kp gain value is. Experiment with different Kp values and observe what happens! (e.g. 0.1 and 10)
|
||||
|
||||

|
||||

|
||||
|
||||
- We set up an infinite while true loop so that the code goes on forever until stopped by the user. (Note: It is technically not great practice to have an infinite while loop, but for the sake of this example it will do) The first thing we need to do at the start of our loop is receive the data from our sensors and define that as our distance reading called “dist”. Based on this distance, we can find out how large our error is by subtracting it off our current distance. (e.g. if our goal is 10 cm and our sensor says we are 23 cm away from the wall, our dist is 23 and error is 23-10=13)
|
||||
|
||||

|
||||

|
||||
|
||||
- This is some defensive programming. We want our difference values to fall between the numbers 0 and 30, whereas the Ultrasonic Sensor can produce values from 0 - 255. We just want to ensure that values don’t spiral out of control and the robot tries to move at 100cm/s.
|
||||
|
||||

|
||||

|
||||
|
||||
- This is where we adjust our speed similar to our previous example. We set our motor speed to be our error between our goal and current sensor reading (the 13 value from before)
|
||||
|
||||

|
||||

|
||||
|
||||
- If a high Kp value shoots up our speed value far above 30 or -30 again, that’s the top speed of our robot! That means we need to restrict the values. The program can do this automatically, but it’s better to have it in your code as defensive programming.
|
||||
|
||||
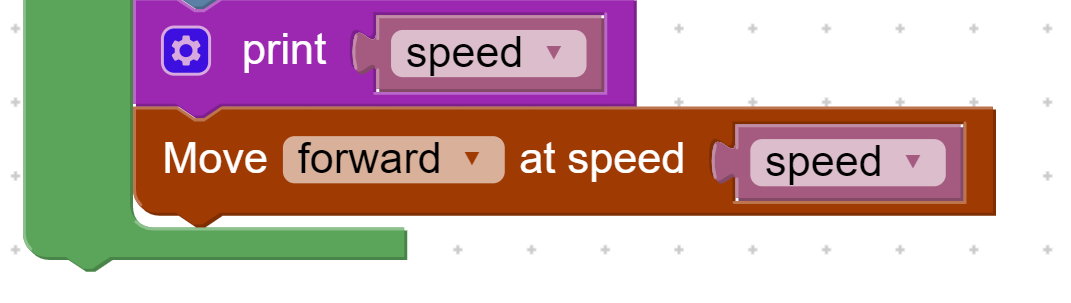
|
||||

|
||||
|
||||
- Finally, we print the speed so that we can see it in our console, and we make the rover move at the speed we have calculated using our controller.
|
||||
|
||||
|
||||
@@ -7,7 +7,7 @@ excerpt: "Learn the basics of how to extend your rover with servo motors."
|
||||
featuredImage: "/images/resources/getting-started-with-servo-motors.png"
|
||||
---
|
||||
|
||||
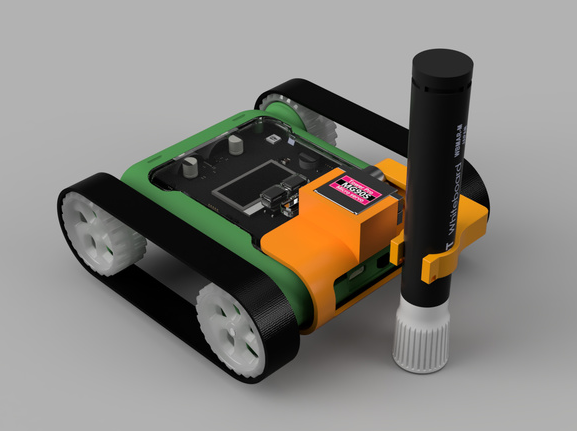
|
||||

|
||||
|
||||
Servo motors are a type of direct current (DC) motor which is a very common type of motor you can find in lots of electronics around your home. Servo motors are very good at making precise movements since they contain a built in controller which ensures the output speed is more reliable. The driving motors on the sides of the rover are freely spinning DC motors. This post will be a brief introduction to how servo motors work, what are the most common servo motors, where to buy them, and how to use them with the Micromelon Rover.
|
||||
|
||||
@@ -15,14 +15,14 @@ Servo motors are a type of direct current (DC) motor which is a very common type
|
||||
|
||||
A servo motor works by using a controller to set the exact position or speed it needs to stay at. There is a small device (the control circuit) that takes an analog input and determines the motor’s position. These motors are more focused on giving you precision over speed/power, and are generally quite weak in terms of torque.
|
||||
|
||||

|
||||

|
||||
|
||||
Servo motors are useful for robotic arms, DVD player trays, cameras, as well as many other devices that need an accurate and/or gentle motor movement.
|
||||
This kind of servo is called a positional rotation servo motor, and is by far the most common type of servo motor. You can set the exact amount of rotation for the motor in terms of degrees from -90 to 90, giving you 180 degrees of rotation.
|
||||
|
||||
The other type of servo motor is called a Continuous Rotation Servo motor which can spin freely much like a regular DC motor.
|
||||
|
||||
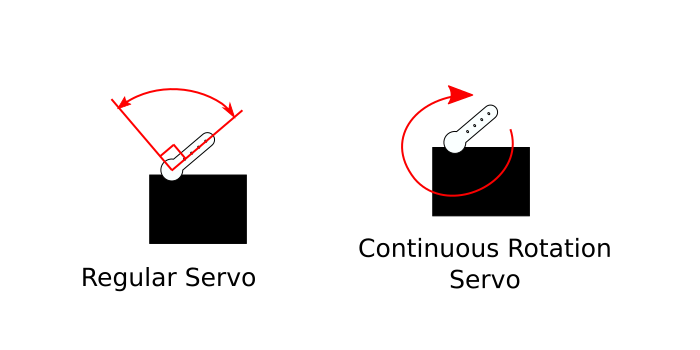
|
||||

|
||||
|
||||
Setting the speed of a regular DC motor is fairly challenging because you need extra components and circuits to do so. You can read more about these circuits called H-Bridges. A continuous rotation servo motor has all of this functionality built into it already, which is why it is used over a DC motor as it makes it significantly easier to use.
|
||||
|
||||
@@ -40,7 +40,7 @@ We’ve provided some product links below of motors we have tested and used with
|
||||
|
||||
#### **A note about servo ratings**
|
||||
|
||||

|
||||

|
||||
|
||||
The servos that we have suggested for light duty applications are called 9g servos. A 9g servo simply means that the motor itself weighs 9 grams. These motors typically give you something around 1.6kg*cm of torque. Which is to say they can lift a 1.6kg weight, at a distance of 1cm. The longer this distance, the weaker the output force will become. This relationship is inversely proportional, so as the distance from the motor doubles, the output force is halved. (E.g. at 2cm this motor will only lift up to 0.8kg of weight) This is usually the most important specification to consider when shopping for a motor as you want it to be able to comfortably supply enough force for your application.
|
||||
|
||||
@@ -52,25 +52,23 @@ On the back of the Micromelon rovers there are two servo ports that you can serv
|
||||
|
||||
## **Using Servo Motors in the Micromelon IDE**
|
||||
|
||||

|
||||

|
||||
|
||||
To use a servo motor with the Micromelon IDE, you have to access the “Extension” section on the left of the user interface. (UI)It is here you can find all of the useful blocks that will interact with servo motors.
|
||||
|
||||
These blocks allow you to set the position of servo motors in terms of degrees. The position you see when you enter a certain value for degrees will depend on the servo motor you are using.
|
||||
|
||||
|
||||

|
||||
|
||||
For using Python the relevant functions can all be found in the functions library for Servos. These all work the same way the blocks do outlined in the more detailed description below.
|
||||
|
||||
#### **Blocks**
|
||||
|
||||
|
||||

|
||||
|
||||
#### Python
|
||||
|
||||
```
|
||||
`Servos.setBoth(45, 30)`
|
||||
```
|
||||
Servos.setBoth(45, 30)
|
||||
|
||||
#### Description
|
||||
|
||||
@@ -80,136 +78,20 @@ You can use the exact same block for Continuous Rotation Servos, but they scale
|
||||
|
||||
---
|
||||
|
||||
|
||||

|
||||
|
||||
```
|
||||
`Servos.left(30)`
|
||||
```
|
||||
Servos.left(30)
|
||||
|
||||
This servo motor block works functionally the exact same as the block above it. It allows you to move only one servo motor in the scenario where two are plugged. You can use the drop down menu by clicking on it. You can input a number, or one of the data blocks.
|
||||
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
```
|
||||
`Servos.read()`
|
||||
```
|
||||
Servos.read()
|
||||
|
||||
This block allows us to utilize what it knows about the servos position. This block gives the value of the servo positions in degrees, and allows you to substitute that value into other blocks.
|
||||
|
||||
## **Wrapping Up**
|
||||
|
||||
Now that we’re familiar with some of the key concepts behind servo motors, the blocks, and the code to use them. We’ve got a bunch of activities you can try and extend with servo motors now that you know how to use them!
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -7,7 +7,7 @@ excerpt: "Crash course on basic rover function, how and what to program and star
|
||||
featuredImage: "/images/resources/getting-started-with-the-micromelon-rover.png"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
### The Micromelon Rover
|
||||
|
||||
@@ -15,23 +15,19 @@ The Rover is a versatile tool for learning robotics and programming designed by
|
||||
|
||||
### Rover Basics
|
||||
|
||||

|
||||

|
||||
|
||||
**Turning The Rover On & Off**
|
||||
|
||||
The **ON/OFF Switch** is located at the back of the Rover. Use this switch to turn the Rover on. Once turned on, the Rover will beep, the LEDs will light up, and the **Rover Screen** will show a 4-digit number (the Bot ID) and the battery indicator.
|
||||
**Turning The Rover On & Off** The ** ON/OFF Switch** is located at the back of the Rover. Use this switch to turn the Rover on. Once turned on, the Rover will beep, the LEDs will light up, and the ** Rover Screen** will show a 4-digit number (the Bot ID) and the battery indicator.
|
||||
|
||||
On a full charge each Rover should last around 5 hours of use. It is a good idea to charge your Rover before first use.
|
||||
|
||||
**Charging The Rover**
|
||||
|
||||
The Rover’s **Charging Port** is located next to the **ON/OFF Switch**. The Rover charging port is USB-C.
|
||||
**Charging The Rover** The Rover’s ** Charging Port** is located next to the ** ON/OFF Switch**. The Rover charging port is USB-C.
|
||||
|
||||
**Charging Class Sets**
|
||||
|
||||
School sets come with a 10 Rover charging dock.
|
||||
|
||||

|
||||

|
||||
|
||||
Connect the Rovers to the charging dock with the USB-C cables. Plug the charging dock into any wall outlet. Any Rovers attached to the dock will begin charging.
|
||||
|
||||
@@ -39,7 +35,7 @@ Connect the Rovers to the charging dock with the USB-C cables. Plug the charging
|
||||
|
||||
Inside Rover box there will be an included USB-C charging cable. Plug the cable into the charging port and connect it to the included power adapter. Other USB power adapters and computers will also work if they can provide sufficient power.
|
||||
|
||||

|
||||

|
||||
|
||||
**Charging Tips**
|
||||
|
||||
@@ -49,7 +45,7 @@ Inside Rover box there will be an included USB-C charging cable. Plug the cable
|
||||
|
||||
### How To Program The Rover
|
||||
|
||||

|
||||

|
||||
|
||||
Each Rover has 5 different types of sensors, 2 motorised tracks, 8 RGB LEDs, a buzzer, 2 servo motor connectors and a UART/I2C expansion header. All of these are programmable with either the Micromelon Code Editor or the Micromelon Python Module.
|
||||
|
||||
@@ -77,7 +73,7 @@ Press the ‘Create Account’ button and fill in the details for your account.
|
||||
|
||||
Now that your Code Editor is set up, you can connect to a Rover and begin coding. Make sure your device’s Bluetooth is turned on as Bluetooth is required to connect to a Rover. Once your Bluetooth is on, turn the Rover on. The 4 digit number on the Rover screen is the Bot ID. Enter the Bot ID into the Bot ID box in the code editor and press GO!
|
||||
|
||||

|
||||

|
||||
|
||||
Only one Code Editor can be connected to a Rover at a time. To disconnect a Rover from the Code Editor press the Unlink button or turn the Rover off.
|
||||
|
||||
@@ -87,31 +83,27 @@ You’ve now connected the Rover and it’s time to start programming the Rover
|
||||
|
||||
Block programming is done in the **Block Editor**. Drag in blocks from the** Block Catalogue**. Alternatively, you can write Python code in the** Text Editor**. You can find information on the Micromelon specific Python functions that are available to you in the** Function Dictionary**. Once you’ve written some code you can run it by pressing the** Run Code ** button. The code will be executed by the Rover connected to your Code Editor. Any errors or print messages will appear in** The Console**.
|
||||
|
||||
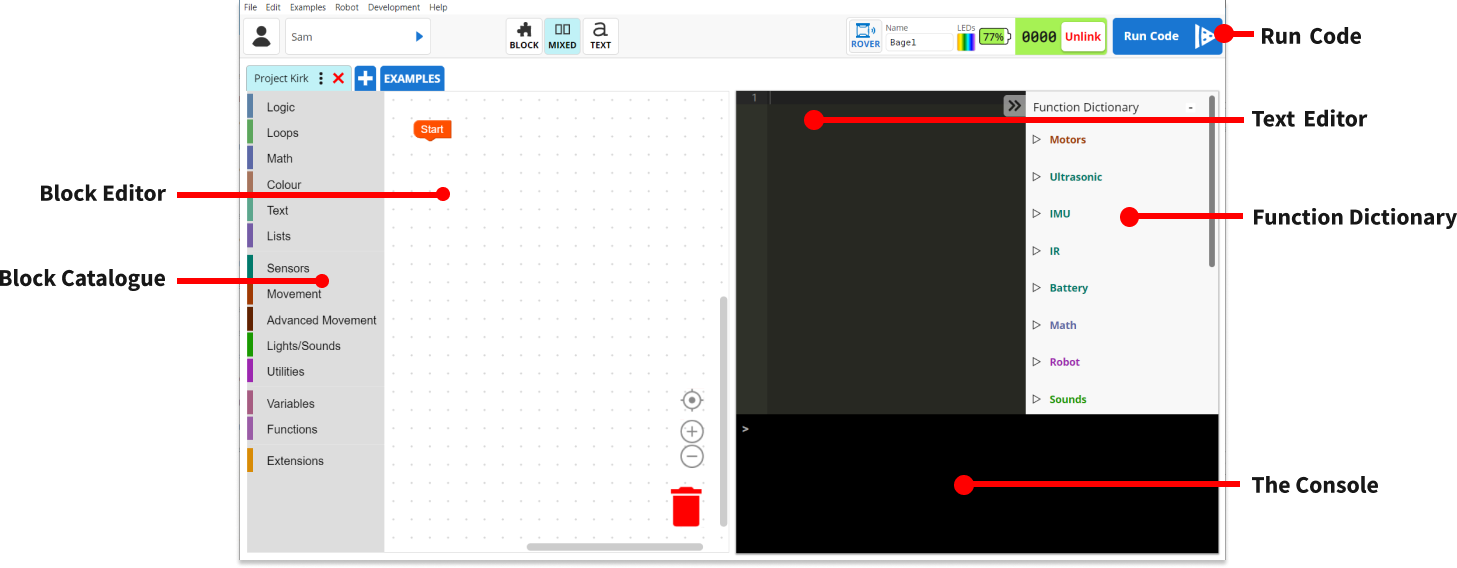
|
||||

|
||||
|
||||
### Writing Your First Line Of Code
|
||||
|
||||
Now that we have the basic layout of the Code Editor and a connected Rover, we can begin coding. Let’s write a program to move the Rover forwards to become familiar writing and running code.
|
||||
|
||||
**Editing Blocks**
|
||||
|
||||
In the Code Editor, look over to the **Block Catalogue** and find the **Movement** category. Click this to expand the category. Find the **Move Forward 10 cm **block. Click and drag this code block over and place it into the Block Editor area. We want to attach this block to the orange Start Block.
|
||||
**Editing Blocks** In the Code Editor, look over to the ** Block Catalogue** and find the ** Movement** category. Click this to expand the category. Find the ** Move Forward 10 cm** block. Click and drag this code block over and place it into the Block Editor area. We want to attach this block to the orange Start Block.
|
||||
|
||||
Note: Any blocks we want to run need to be attached to the orange Start block. Blocks not attached will not be run by the Rover.
|
||||
|
||||
We’ve written our first line of code using blocks, now let’s edit some Python.
|
||||
|
||||
|
||||

|
||||
|
||||
**Editing The Python**
|
||||
|
||||
The Python in the Text Editor should have updated. Look to the Text Editor on the right, and you should see the code **Motors.moveDistance(10)** on the first line. This is the same piece of code we just created with our blocks, but now it is represented in Python. All of the changes we make to the blocks will translate to Python and vice versa. Let’s edit the Python now.
|
||||
**Editing The Python** The Python in the Text Editor should have updated. Look to the Text Editor on the right, and you should see the code ** Motors.moveDistance(10)** on the first line. This is the same piece of code we just created with our blocks, but now it is represented in Python. All of the changes we make to the blocks will translate to Python and vice versa. Let’s edit the Python now.
|
||||
|
||||
The number 10 in the brackets is the number of centimetres the Rover will move. In Python we call this an argument. Let’s change this 10 to a 20. Our code will now make the Rover move 20cm instead of 10cm. Once we change this the Blocks will update to reflect the change.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
**Running Our Code**
|
||||
|
||||
@@ -123,7 +115,7 @@ If you need to stop a running Rover, you can click the ‘Stop’ button that re
|
||||
|
||||
As mentioned before, the Rover has 5 different types of sensors, 2 motorised tracks, 4 RGB LEDs, a buzzer, 2 servo motor connectors and a UART/I2C expansion header. All of these are programmable from the Code Editor. Let’s look at what each of these do.
|
||||
|
||||

|
||||

|
||||
|
||||
**Actuators**
|
||||
|
||||
@@ -139,7 +131,7 @@ Program the buzzer to play sounds and the LEDs to illuminate colours. These can
|
||||
|
||||
Blocks to control the LEDs and Buzzer are found in the **Lights/Sounds** category of the ** Block Catalogue** in the Code Editor.
|
||||
|
||||

|
||||

|
||||
|
||||
**Sensors**
|
||||
|
||||
@@ -163,9 +155,9 @@ The accelerometer and gyroscope allow you to determine the Rover’s current ori
|
||||
|
||||
When planning the code you are going to write for the Rover, it is useful to be able to see what the Rover sees. When you are connected to the Rover in the Code Editor, you can click the Rover icon to the left of the Bot ID to open a live view of what every sensor is currently reading. This can be useful for calibrating your sensors and debugging your code. The sensor values can also be cycled through on the Rover screen using the buttons on the Rover.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
**Expansion**
|
||||
|
||||
@@ -178,315 +170,3 @@ Blocks to interface with the Servo and UART/I2C connectors are found in the **Ex
|
||||
**Beginners**
|
||||
|
||||
If this is your first time using Micromelon or you are still becoming familiar with how to control the Rover, here are some good starter activities.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-making-music-beginner)
|
||||
|
||||
[Activity: Making Music (Beginner)](/resources/activity-making-music-beginner)
|
||||
|
||||
[Read More →](/resources/activity-making-music-beginner)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/cargo-bot)
|
||||
|
||||
[Cargo Bot](/resources/cargo-bot)
|
||||
|
||||
Don’t drop the cargo!
|
||||
|
||||
[Read More →](/resources/cargo-bot)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/spike-drop)
|
||||
|
||||
[Activity: Spike Drop](/resources/spike-drop)
|
||||
|
||||
Simulator activity for learning ultrasonic, colour sensor and iteration.
|
||||
|
||||
[Read More →](/resources/spike-drop)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/maze)
|
||||
|
||||
[Activity: Maze](/resources/maze)
|
||||
|
||||
Learn branching, iteration, algorithm design, and how to use the Rover’s motors, ultrasonic, colour, and IR sensors.
|
||||
|
||||
[Read More →](/resources/maze)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/conversation-bot)
|
||||
|
||||
[Activity: Conversation Bot](/resources/conversation-bot)
|
||||
|
||||
Learn iteration, branching, and how to use the buzzer and LEDs.
|
||||
|
||||
[Read More →](/resources/conversation-bot)
|
||||
|
||||
**Intermediate**
|
||||
|
||||
If you are starting to get the hang of things, try these intermediate activities.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-servo-gauge)
|
||||
|
||||
[Activity: Servo Gauge](/resources/activity-servo-gauge)
|
||||
|
||||
[Read More →](/resources/activity-servo-gauge)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-making-music-intermediate)
|
||||
|
||||
[Activity: Making Music (Intermediate)](/resources/activity-making-music-intermediate)
|
||||
|
||||
[Read More →](/resources/activity-making-music-intermediate)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/binary-bot)
|
||||
|
||||
[Activity: Binary Bot](/resources/binary-bot)
|
||||
|
||||
Complete a simple exercise using only binary numbers!
|
||||
|
||||
[Read More →](/resources/binary-bot)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/rover-van-gogh)
|
||||
|
||||
[Activity: Rover Van Gogh](/resources/rover-van-gogh)
|
||||
|
||||
Get your art on with the pen attachment!
|
||||
|
||||
[Read More →](/resources/rover-van-gogh)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/line-following)
|
||||
|
||||
[Activity: Line Following](/resources/line-following)
|
||||
|
||||
Learn the colour sensor and simple algorithm design while following the line.
|
||||
|
||||
[Read More →](/resources/line-following)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/windup-rover)
|
||||
|
||||
[Activity: Wind-up Rover](/resources/windup-rover)
|
||||
|
||||
Learn iteration, variables, maths, and how to use the Rover’s motors and accelerometer.
|
||||
|
||||
[Read More →](/resources/windup-rover)
|
||||
|
||||
**Advanced**
|
||||
|
||||
Once you are comfortable with programming the Rover actuators and sensors, test yourself with these advanced activities.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-making-music-advanced)
|
||||
|
||||
[Activity: Making Music (Advanced)](/resources/activity-making-music-advanced)
|
||||
|
||||
[Read More →](/resources/activity-making-music-advanced)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-rover-theremin)
|
||||
|
||||
[Activity: Rover Theremin](/resources/activity-rover-theremin)
|
||||
|
||||
[Read More →](/resources/activity-rover-theremin)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-the-micromelon-rover-uart)
|
||||
|
||||
[How to Use UART ](/resources/getting-started-the-micromelon-rover-uart)
|
||||
|
||||
[Read More →](/resources/getting-started-the-micromelon-rover-uart)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[Activity: Seed Planter](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[Read More →](/resources/line-following-h433h-89p7d-capak-lpsxl)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-pingpong-attachment)
|
||||
|
||||
[Activity: Ping-Pong Shooter](/resources/activity-pingpong-attachment)
|
||||
|
||||
[Read More →](/resources/activity-pingpong-attachment)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/activity-forklift-attachment)
|
||||
|
||||
[Activity: Forklift Attachment](/resources/activity-forklift-attachment)
|
||||
|
||||
[Read More →](/resources/activity-forklift-attachment)
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "Getting Setup with the Micromelon Python Module "
|
||||
date: "2022-11-16"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Getting Started"]
|
||||
tags: ["Python", "Guide"]
|
||||
excerpt: "Learn how to start programming the Rover with Python!"
|
||||
featuredImage: "/images/resources/getting-started-with-the-python-module.png"
|
||||
@@ -17,17 +17,13 @@ An integrated development environment (IDE) is a program that allows us to easil
|
||||
|
||||
You can find guides to setup VS Code [here](/resources/install-guide-vs-code)** ** or PyCharm [here](/resources/install-guide-pycharm). These guides will take you through the process of installing the IDE and the Micromelon Python Module.
|
||||
|
||||

|
||||

|
||||
|
||||
#### **Guide: How To Install VS Code**
|
||||
#### **Guide: How To Install VS Code **[** READ MORE**](/resources/install-guide-vs-code)
|
||||
|
||||
[**READ MORE**](/resources/install-guide-vs-code)
|
||||

|
||||
|
||||

|
||||
|
||||
#### **Guide: How To Install PyCharm**
|
||||
|
||||
[**READ MORE**](/resources/install-guide-pycharm)
|
||||
#### **Guide: How To Install PyCharm **[** READ MORE**](/resources/install-guide-pycharm)
|
||||
|
||||
## Your First Program using the Micromelon Python Module
|
||||
|
||||
@@ -53,9 +49,7 @@ rc.end()
|
||||
|
||||
```
|
||||
|
||||
```
|
||||
`We will now breakdown the code line-by-line to help you understand what the functions and classes do.`
|
||||
```
|
||||
We will now breakdown the code line-by-line to help you understand what the functions and classes do.
|
||||
|
||||
This line imports the Micromelon Module alongside all its functions and classes making them available for use in your code.
|
||||
|
||||
@@ -101,7 +95,7 @@ rc.end()
|
||||
|
||||
**Using the Ultrasonic Sensor and Motors**
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Puppy Bot
|
||||
|
||||
@@ -171,7 +165,7 @@ else:
|
||||
|
||||
**Using The Colour Sensor, Sounds and Display**
|
||||
|
||||

|
||||

|
||||
|
||||
#### Activity: Random Bug Bot 2
|
||||
|
||||
@@ -278,7 +272,7 @@ You can expand your code to add other functionality to the Rover based on a user
|
||||
|
||||
**Note:** If you are using VS Code, you can use the short cut “Ctrl + F5” to open the console window, then click** TERMINAL** to select the terminal pane. The terminal pane is where our prompts will be printed.
|
||||
|
||||

|
||||

|
||||
|
||||
VS Code Terminal Window
|
||||
|
||||
@@ -365,115 +359,3 @@ This section of the code compares the user entered command against several prede
|
||||
```
|
||||
|
||||
Now it’s time to try it out yourself! See what amazing things you can do with the combined power of Python and the Micromelon Rover. Why not try doing some of the other activities on our website yourself.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "How to Design a Rover Attachment"
|
||||
date: "2024-12-31"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: []
|
||||
excerpt: "Rover attachments are a great way to extend the Rover’s capabilities with 3D printing. It’s a wonderful way to upgrade or customise your Rover to suit any project imaginable.Existing Attachments:Here at Micromelon, we’ve already gone ahead and made a"
|
||||
featuredImage: "/images/resources/guide-how-to-design-a-rover-attachment.PNG"
|
||||
---
|
||||
|
||||
|
||||

|
||||
|
||||
Rover attachments are a great way to extend the Rover’s capabilities with 3D printing. It’s a wonderful way to upgrade or customise your Rover to suit any project imaginable.
|
||||
|
||||
@@ -15,67 +15,63 @@ Rover attachments are a great way to extend the Rover’s capabilities with 3D p
|
||||
|
||||
Here at Micromelon, we’ve already gone ahead and made a few attachments for you to use and take inspiration from. These attachments fit onto the mounting tabs on the rover body and utilise the sensors and servos to transform them into things such as diggers, tippers, or even add claws.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Domino Layer
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Claw
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Roborave Line Follow
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Ping-Pong Shooter
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Tipper
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Whiteboard Marker Holder
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Seed Planter
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
For further information about our existing attachments, visit our page on rover expansions.
|
||||
|
||||
[
|
||||
Rover Expansions & 3D Printing
|
||||
](/rover-expansion-3d-printing)
|
||||
For further information about our existing attachments, visit our page on rover expansions.[Rover Expansions & 3D Printing](/rover-expansion-3d-printing)
|
||||
|
||||
## Constraints:
|
||||
|
||||
@@ -105,25 +101,25 @@ Before starting, it is a good idea to have some practice in 3D designing softwar
|
||||
|
||||
Below are some valuable sketches and components that can be used to design your attachment.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Servo Horn Sketch
|
||||
|
||||
Sketch for attaching servo horns to prints. Good to extrude it about 5mm in.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Servo Mount
|
||||
|
||||
Perfect size for mounting a micro servo.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
#### Connections:
|
||||
|
||||
@@ -135,10 +131,6 @@ While the designs are limited to two servos, the output of these actuators can b
|
||||
|
||||
For a more detailed guide to 3D printing connections and gears, visit the pages shown below.
|
||||
|
||||
[
|
||||
Guide To Gears
|
||||
](guide-to-using-gears)
|
||||
[Guide To Gears](guide-to-using-gears)
|
||||
|
||||
[
|
||||
Guide to 3D Printing Connections
|
||||
](connections-in-3d-printing)
|
||||
[Guide to 3D Printing Connections](connections-in-3d-printing)
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "Guide: Starting an After School Robotics Club"
|
||||
date: "2024-05-07"
|
||||
categories: ["Guides"]
|
||||
categories: ["Getting Started"]
|
||||
tags: ["after school", "robotics club"]
|
||||
excerpt: "Interested in starting your own after school robotics club? Here’s our quick start guide to how we approach it! Step 1: Gauging Interest and Goal SettingThe first step to any successful project is finding something to work towards. Find out what your"
|
||||
featuredImage: "/images/resources/guide-starting-an-after-school-robotics-club.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
Interested in starting your own after school robotics club? Here’s our quick start guide to how we approach it!
|
||||
|
||||
|
||||
@@ -1,19 +1,19 @@
|
||||
---
|
||||
title: "Guide to Making Attachments in Tinkercad"
|
||||
date: "2024-08-03"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: []
|
||||
excerpt: "Designing 3D printed attachments for the Micromelon rover is a fantastic way to upskill in CAD design while making your own custom additions. Tinkercad is a free-to-use software that allows you to bend and stretch existing shapes to create your own o"
|
||||
featuredImage: "/images/resources/guide-to-making-attachments-in-tinkercad.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
Designing 3D printed attachments for the Micromelon rover is a fantastic way to upskill in CAD design while making your own custom additions. Tinkercad is a free-to-use software that allows you to bend and stretch existing shapes to create your own ones. In this guide, we’ll be going through some of the basic Tinkercad tools and how we would go about designing a sumo ramp for the rover.
|
||||
|
||||
## The Workspace:
|
||||
|
||||

|
||||

|
||||
|
||||
When a new project is opened in Tinkercad, the following screen is what we see. Highlighted by coloured squares are some important tools to get started.
|
||||
|
||||
@@ -43,34 +43,34 @@ The align tool is useful for quickly making a number of objects sit on the same
|
||||
|
||||
To get started, first download our rover shell clip [here](/s/MM-Attachment-Clip.stl). Next, open up the downloaded file in a new Tinkercad project by using **Import > Choose a File > (open the file) > Import**. Drop a ruler into the workplane and rotate the clip so that it looks like the image below:
|
||||
|
||||

|
||||

|
||||
|
||||
#### Step 2:
|
||||
|
||||
Next, use a rectangle to cut off the bolt tabs at the front. The hole should look like the following image before grouping.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Step 3:
|
||||
|
||||
Next, we need to make the weapon for our attachment. For this, we used a wedge and modified the shape so it serves as a sumo ramp. It’s not attached to the clip just yet.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Step 4:
|
||||
|
||||
Next, we need to attach the ramp to the attachment clip. Move the ramp in so that it’s overlapping with the clip. Make sure it doesn’t come too far in as the rover needs to sit inside the clip. Use the align tool to make sure the ramp is centred on the clip. Don’t worry about the ultrasonic sensor opening, we’ll take care of this in the next step. Group the objects together once everything is in place.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Step 5:
|
||||
|
||||
Finally, we need to cut a hole so that the rover ultrasonic sensor can see through the ramp. Download the [Ultrasonic Bore](/s/Ultrasonic-Bore.stl), and import it into the workplane. Next, position the bore as a hole so that it can cut through the hole on the clip and into the wedge. It’s easier to look from the back of the clip. The align tool and looking from many directions can help a lot with this step. Once everything is in position, merge the objects so the hole cuts through.
|
||||
|
||||

|
||||

|
||||
|
||||
#### Complete:
|
||||
|
||||

|
||||

|
||||
|
||||
Now that is the complete design on how to make a very basic attachment for the rover. Try experimenting with more complex shapes using a combination of solids. Maybe try to increase the amount of contact your shapes have with the rover clip to make a stronger bond.
|
||||
|
||||
@@ -1,19 +1,19 @@
|
||||
---
|
||||
title: "Guide to RoboRave Line-Follow"
|
||||
date: "2024-12-31"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: ["Guide", "Guides", "Line Follow"]
|
||||
excerpt: "Welcome to the guide to starting RoboRave Line-Follow from scratchThe Challenge The goal of RoboRave Line-Follow (SPRINT) is to create a robot that can follow a black line and deliver a single ping-pong ball to a tower at the end of the track. The ga"
|
||||
featuredImage: "/images/resources/guide-to-roborave-line-follow.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
Welcome to the guide to starting RoboRave Line-Follow from scratch
|
||||
|
||||
## The Challenge
|
||||
|
||||
|
||||

|
||||
|
||||
The goal of RoboRave Line-Follow (SPRINT) is to create a robot that can follow a black line and deliver a single ping-pong ball to a tower at the end of the track. The game lasts 3 minutes, and after scoring the first ball, robots may continue scoring balls for the duration of the match. There are three fields for elementary, middle, and high school with increasing difficulty, respectively.
|
||||
|
||||
@@ -39,11 +39,7 @@ Scores are an accumulation of the following tasks:
|
||||
|
||||
- The weight limit for the robot is a maximum of 1kg
|
||||
|
||||
For the rest of the tournament rules and specific scoring matrices for each age division, visit the link below to the RoboRave website rules page.
|
||||
|
||||
[
|
||||
Line-Follow Rules
|
||||
](https://roboraveaustralia.com/wp-content/uploads/2022/10/All-2023-Challenge-Rules-V1-PDF.pdf)
|
||||
For the rest of the tournament rules and specific scoring matrices for each age division, visit the link below to the RoboRave website rules page.[Line-Follow Rules](https://roboraveaustralia.com/wp-content/uploads/2022/10/All-2023-Challenge-Rules-V1-PDF.pdf)
|
||||
|
||||
## Getting Started
|
||||
|
||||
@@ -51,21 +47,13 @@ For the rest of the tournament rules and specific scoring matrices for each age
|
||||
|
||||
For the line-follow aspect of the challenge, the in-built colour sensors on the Micromelon rover can be used. Thus, the main focus of the physical build is to design and construct a system to carry and deposit the balls in the tower. The tower is an A4 mailing box, 20cm tall and 10cm wide, with a 10cm x 10cm wide hole at the top for the ping-pong balls.
|
||||
|
||||
Because of this, the recommended technique is to build a tower of sorts on top of the Rover with a container to store the balls. This container should also have a system (like a servo) to release the balls when it reaches the tower. Our 3D-printed RoboRAVE Line-follow attachment encompasses these considerations. For more details, click on button below to head to the build guide.
|
||||
Because of this, the recommended technique is to build a tower of sorts on top of the Rover with a container to store the balls. This container should also have a system (like a servo) to release the balls when it reaches the tower. Our 3D-printed RoboRAVE Line-follow attachment encompasses these considerations. For more details, click on button below to head to the build guide.[Build Guide: Roborave Line Follow](https://micromelon.com.au/resources/build-guide-roborave-line-follow)
|
||||
|
||||
[
|
||||
Build Guide: Roborave Line Follow
|
||||
](https://micromelon.com.au/resources/build-guide-roborave-line-follow)
|
||||
|
||||

|
||||

|
||||
|
||||
**Coding:**
|
||||
|
||||
For the coding aspect of the challenge, the recommended strategy is to use a basic line following technique with some modifications to suit the challenge. The link to the Micromelon Line Following activity has been added below.
|
||||
|
||||
[
|
||||
Activity: Line Following
|
||||
](https://micromelon.com.au/resources/line-following?rq=follow)
|
||||
For the coding aspect of the challenge, the recommended strategy is to use a basic line following technique with some modifications to suit the challenge. The link to the Micromelon Line Following activity has been added below.[Activity: Line Following](https://micromelon.com.au/resources/line-following?rq=follow)
|
||||
|
||||
After making the basic line following code, we need to add some conditions, so the robot is aware when it’s reached an intersection, reached the tower, or has returned home. Each situation is represented by a black line perpendicular to the current track. This can be seen in the line following mat examples in the RoboRave rules.
|
||||
|
||||
@@ -93,30 +81,21 @@ When these black areas are detected, the Rover must deduce the area type. This c
|
||||
|
||||
One way to make the Rover follow the line faster is to use an external colour and light sensor instead of the three on the Rover. There are several sensors with differing capabilities. One such sensor is the QTR-8RC line sensor array which senses reflected light intensity from 8 infrared sensors. The expansion headers on the Rover can be connected to an external microcontroller which can be used to interface with these external sensors. For further detail about using the expansion header, head over to the guide to I2C and UART pages and the Rover and Arduino Line Follow showcase.
|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
[
|
||||
How to use I2C
|
||||
](how-to-use-i2c)
|
||||
[How to use I2C](how-to-use-i2c)
|
||||
|
||||
[
|
||||
How to Use UART
|
||||
](getting-started-the-micromelon-rover-uart)
|
||||
[How to Use UART](getting-started-the-micromelon-rover-uart)
|
||||
|
||||
[Showcase; Rover and Arduino Line Follow](showcase-rover-and-arduino-line-follow)
|
||||
|
||||
[
|
||||
Showcase; Rover and Arduino Line Follow
|
||||
](showcase-rover-and-arduino-line-follow)
|
||||
|
||||
#### PID Line Follow:
|
||||
|
||||
When making your own line-follow code, most simple implementations will have the Rover following the line in a jerky motion. Implementing a PID (Proportional Integral Derivative) controller can smooth this motion and improve the Rover’s ability to follow the line quickly and more accurately. The basic idea is to use reflected light intensity from the line sensors. This value is usually very high on white and low on black, so the goal is to follow the middle point between the two, which we’ll call the grey area.
|
||||
|
||||
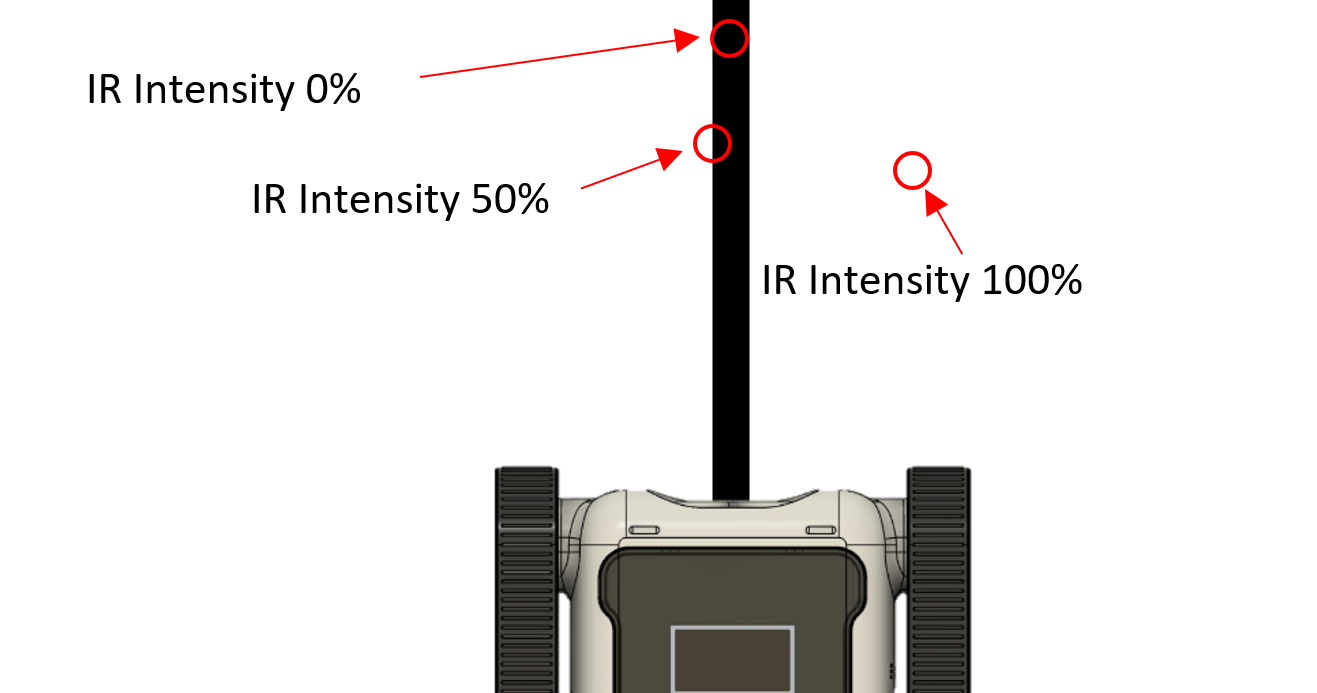
|
||||

|
||||
|
||||
Our target will be 50% intensity. If the reading is less than that, the Rover will veer away from the line; if it’s greater than 50%, it will turn towards the line. The entire PID equation is excessive for the task, so a simple Proportional controller should suffice in most cases. Check out our guide for more information about making proportional controllers (link below).
|
||||
|
||||
[
|
||||
Getting Started With Proportional Control On A Micromelon Rover
|
||||
](https://micromelon.com.au/resources/getting-started-with-proportional-controls)
|
||||
Our target will be 50% intensity. If the reading is less than that, the Rover will veer away from the line; if it’s greater than 50%, it will turn towards the line. The entire PID equation is excessive for the task, so a simple Proportional controller should suffice in most cases. Check out our guide for more information about making proportional controllers (link below).[Getting Started With Proportional Control On A Micromelon Rover](https://micromelon.com.au/resources/getting-started-with-proportional-controls)
|
||||
|
||||
@@ -1,19 +1,19 @@
|
||||
---
|
||||
title: "Guide to Using Gears"
|
||||
date: "2024-12-31"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: []
|
||||
excerpt: "Gears can be found in many of the machines around you in everyday life. This guide will show you when and where to use gears in your designs.Advantages and examples of gears: Many different types of gears exist, and each type can be used for a differ"
|
||||
featuredImage: "/images/resources/guide-to-using-gears.PNG"
|
||||
---
|
||||
|
||||
|
||||

|
||||
|
||||
Gears can be found in many of the machines around you in everyday life. This guide will show you when and where to use gears in your designs.
|
||||
|
||||
## Advantages and examples of gears:
|
||||
|
||||

|
||||

|
||||
|
||||
Many different types of gears exist, and each type can be used for a different purpose:
|
||||
|
||||
@@ -27,7 +27,7 @@ Many different types of gears exist, and each type can be used for a different p
|
||||
|
||||
One of the common and simple uses of gears is to change mechanical advantage. Mechanical advantage is a value that represents the amplification of force or strength. For example, a mechanical advantage of 4 means quadrupling the input force.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Salish 274*
|
||||
|
||||
@@ -37,13 +37,13 @@ As seen in the diagram above, when a driver gear has more teeth than the driven
|
||||
|
||||
While designing gears traditionally is possible, in this guide, we’ll be going through how to use the Spur Gear Add-in from Fusion 360. As seen below, on a new Fusion part, navigate to Utilities > Add-ins > Add-ins > Spur Gear (there will be two, either will work).
|
||||
|
||||

|
||||

|
||||
|
||||
Now, back in the Solid section, under the create tab, you will find the new spur gear tool. Note that the process above must be repeated for each new part. Click on the spur gear option, and the menu below will appear.
|
||||
|
||||
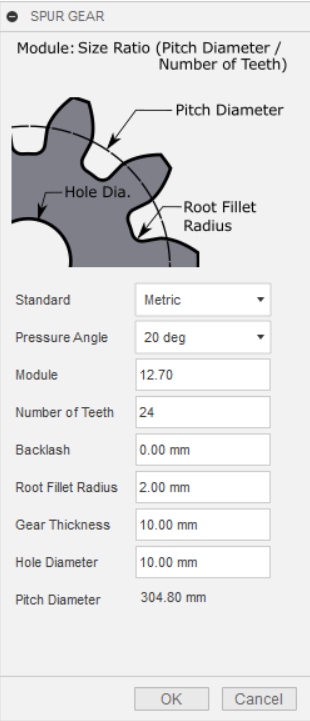
|
||||

|
||||
|
||||
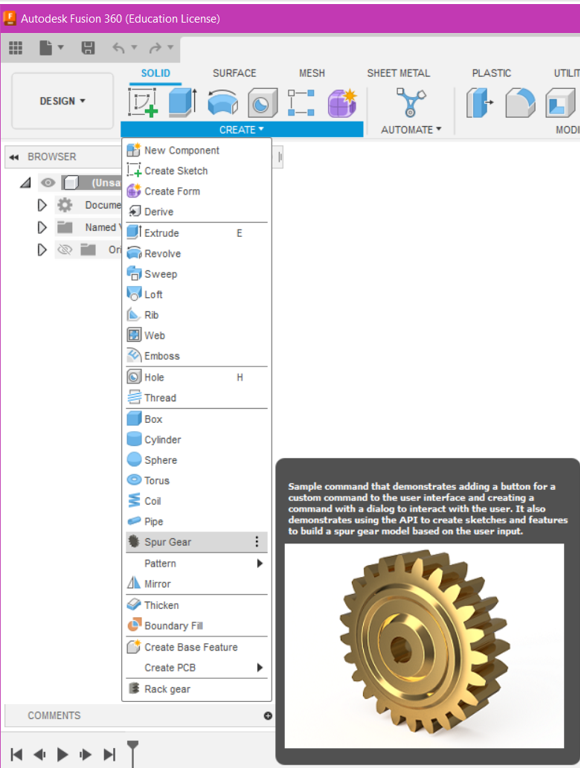
|
||||

|
||||
|
||||
To make your gear, go through the following options that are suited for your project:
|
||||
|
||||
@@ -65,13 +65,13 @@ A good tutorial to follow for additional practice is ‘Spur Gears in Fusion 360
|
||||
|
||||
A rack can be meshed with a spur gear to make a rack and pinion system. This is a great way to convert rotational movement into linear movement.
|
||||
|
||||

|
||||

|
||||
|
||||
To start designing racks in Fusion, we need to install the ‘Rack Gear Generator’ created by Niklas Pöllönen ([Link Here](https://apps.autodesk.com/FUSION/en/Detail/Index?appLang=en&id=5830349459343127086&os=Mac)). Click the link and follow the appropriate installation instructions for your device. Once installed, the rack gear option should appear under the create tab in the solids section. Click on it, and you should find the following pop-up.
|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
Once you have made a spur gear of your choice, go through the following options to make your desired rack:
|
||||
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "The Gyroscope"
|
||||
date: "2021-06-24"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Sensor Guides"]
|
||||
tags: []
|
||||
excerpt: "Learn what the gyroscope is and how to code it."
|
||||
featuredImage: "/images/resources/gyroscope.gif"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
The gyroscope is one of the five sensor types on the Micromelon Rover. The gyroscope is a component built into the Rover’s PCB (printed circuit board). It’s only about 2.5mm x 3.0mm wide and 0.83mm tall. This component also includes another sensor, the accelerometer.
|
||||
|
||||
@@ -17,7 +17,7 @@ The gyroscope is a device designed to detect how fast the rover is rotating and
|
||||
|
||||
### History of the Gyroscope
|
||||
|
||||

|
||||

|
||||
|
||||
A Traditional Gyroscope
|
||||
|
||||
@@ -29,9 +29,9 @@ The spin axis & rotor are designed to spin at a height speed. As the spin axis &
|
||||
|
||||
**No Motion**
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
*Gyroscope footage above sourced from the YouTube channel ScienceOnline.*
|
||||
|
||||
@@ -41,11 +41,11 @@ As we can see, when the gyroscope components are not in motion, gravity causes t
|
||||
|
||||
The gyroscope on the Rover is something called a microelectromechanical system (MEMS). A MEMS gyroscope mechanically works a lot different to a traditional mechanical gyroscope like the one’s we’ve seen already. It doesn’t have a spinning rotor and gimbal rings. Although a traditional gyroscope and a MEMS gyroscope mechanically work different, the fundamental physics is the same. There is a lot of marvellous engineering that go into MEMS gyroscopes. We won’t explain that here as it’s a bit too complicated for one blog post.
|
||||
|
||||

|
||||

|
||||
|
||||
To simplify things, let’s imagine inside the rover there is a traditional mechanical gyroscope that is constantly in motion (so it will always stay straight even against gravity). Around the gyroscope is a protractor. When the rover is flat on the ground, the the protractor aligns the gyroscope with 0 degrees. Let’s breakdown how this helps our rover determine rotation.
|
||||
|
||||

|
||||

|
||||
|
||||
- The rover starts flat. The 0th degree of the protractor is aligned with the gyroscope. This means there is no rotation.
|
||||
|
||||
@@ -61,25 +61,23 @@ In our example we can see the rover rotating on its side. The rover could also r
|
||||
|
||||
Using the gyroscope, our Rover can detect it is rotating but it can also tell us specifically in which direction it is rotating. It doesn’t make sense if the rover starts telling us “*Hey I am spinning left*”. Unfortunately, this isn’t clear enough. We need a simple way for us to understand and communicate the Rovers direction of rotation. This is what the 3 axis of movement are for.
|
||||
|
||||

|
||||

|
||||
|
||||
**The 3 Axis, X Y and Z**
|
||||
|
||||
The 3 axis are specific directions the rover uses. The **X axis **runs from back to front of the rover. The **Y axis** runs across the rover middle from left to right. The **Z axis** down and up through the Rover’s middle.
|
||||
**The 3 Axis, X Y and Z** The 3 axis are specific directions the rover uses. The ** X axis** runs from back to front of the rover. The ** Y axis** runs across the rover middle from left to right. The ** Z axis** down and up through the Rover’s middle.
|
||||
|
||||
The rover can rotate around all 3 axis. Below is a demonstration of rotation along each axis.
|
||||
|
||||
**X Axis Rotation**
|
||||
|
||||

|
||||

|
||||
|
||||
**Y Axis Rotation**
|
||||
|
||||

|
||||

|
||||
|
||||
**Z Axis Rotation**
|
||||
|
||||

|
||||

|
||||
|
||||
### Gyroscope Calibration
|
||||
|
||||
@@ -89,7 +87,7 @@ This irregularity is unfortunately unavoidable for the Rover’s built in gyrosc
|
||||
|
||||
**How To Recalibrate the Gyroscope**
|
||||
|
||||

|
||||

|
||||
|
||||
- Open the Code Editor and connect to the Rover you want to calibrate. If you need a refresher on using the Code Editor, check out the [Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover) post
|
||||
|
||||
@@ -109,9 +107,9 @@ Open up the Code Editor, connect to a Micromelon Rover and open up the sensor vi
|
||||
|
||||
In the sensor view dialog, the gyroscope values are located in the bottom right table. The second column of the table is the gyroscope values & the third column is the accumulated gyroscope values. We’ll get into the difference between gyro vs accumulated gyro later. Move the rover around and take note of how the X, Y and Z values change.
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
**Gyroscope or Accumulated Gyroscope Value?**
|
||||
|
||||
@@ -134,7 +132,7 @@ We know that there are 3 axis the rover can rotate around but should we rotate t
|
||||
|
||||
Let’s write a simple program to make our Rover make sounds when it rotates. As it rotates faster the sound will be higher pitched.
|
||||
|
||||
|
||||

|
||||
|
||||
- Start with our **While True** loop as our program will have to be repeated to keep getting live data.
|
||||
|
||||
@@ -142,9 +140,7 @@ Let’s write a simple program to make our Rover make sounds when it rotates. As
|
||||
|
||||
- Let’s set the *gyro* variable to the **Read From Gyroscope** block. Change the dropdown to the ** Z Axis**. You can find this block in the** Sensors** category.
|
||||
|
||||
The python command for reading the Z axis is **IMU.readGyro(2)**
|
||||
|
||||
- The Rover’s buzzer cannot read negative numbers so we must check if the Rover’s Z axis gyroscope value is negative. Let’s use an **IF** block. In the condition check if the *gyro* variable is less than 0.
|
||||
The python command for reading the Z axis is **IMU.readGyro(2)**- The Rover’s buzzer cannot read negative numbers so we must check if the Rover’s Z axis gyroscope value is negative. Let’s use an** IF** block. In the condition check if the *gyro* variable is less than 0.
|
||||
|
||||
- Inside the **IF** block, when the condition is successful and the gyroscope value is a negative number we will update the *gyro* variable to ***gyro x -1*** using a multiplication block. This will ensure the *gyro *variable is always positive.
|
||||
|
||||
@@ -158,7 +154,7 @@ While this code is running our rover will be making sounds depending on how much
|
||||
|
||||
Let’s write a similar program as we did above but now using our accumulated gyroscope.
|
||||
|
||||
|
||||

|
||||
|
||||
- Start with our **While True** loop as our program will have to be repeated to keep getting live data.
|
||||
|
||||
@@ -166,9 +162,7 @@ Let’s write a similar program as we did above but now using our accumulated gy
|
||||
|
||||
- Lets set the *gyro* variable to the **Read From Accumulated Gyroscope** block. Change the dropdown to the ** Z Axis**. You can find this block in the** Sensors** category.
|
||||
|
||||
The python command for reading the Z axis is **IMU.readGyroAccum(2)**
|
||||
|
||||
- The Rover’s buzzer cannot read negative numbers so we must check if the Rover’s Z-axis gyroscope value is negative. Let’s use an **IF** block. In the condition check if the *gyro* variable is less than 0.
|
||||
The python command for reading the Z axis is **IMU.readGyroAccum(2)**- The Rover’s buzzer cannot read negative numbers so we must check if the Rover’s Z-axis gyroscope value is negative. Let’s use an** IF** block. In the condition check if the *gyro* variable is less than 0.
|
||||
|
||||
- Inside the **IF** block, when the condition is successful, and the gyroscope value is a negative number we will update the *gyro* variable to ***gyro* x -1** using a multiplication block. This will ensure the *gyro *variable is always positive.
|
||||
|
||||
@@ -181,213 +175,3 @@ While this code is running our rover will be making sounds. As you rotate the ro
|
||||
### Wrapping Up
|
||||
|
||||
Now that we’re familiar with what the gyroscope is, how it works and how to program it, it’s time to start doing some activities. Try these activities that require using the gyroscope.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/micromelon-code-editor-283)
|
||||
|
||||
Jun 4, 2025
|
||||
|
||||
[Micromelon Code Editor 2.8](/resources/micromelon-code-editor-283)
|
||||
|
||||
Jun 4, 2025
|
||||
|
||||
[Read More →](/resources/micromelon-code-editor-283)
|
||||
|
||||
Jun 4, 2025
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/build-guide-bulldozer)
|
||||
|
||||
Feb 20, 2025
|
||||
|
||||
[Build Guide: Bulldozer](/resources/build-guide-bulldozer)
|
||||
|
||||
Feb 20, 2025
|
||||
|
||||
[Read More →](/resources/build-guide-bulldozer)
|
||||
|
||||
Feb 20, 2025
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/build-guide-ping-pong-shooter)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Build Guide: Ping Pong Shooter](/resources/build-guide-ping-pong-shooter)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Read More →](/resources/build-guide-ping-pong-shooter)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[
|
||||
|
||||
|
||||
|
||||
](/resources/how-to-use-i2c)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[How to use I2C](/resources/how-to-use-i2c)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Read More →](/resources/how-to-use-i2c)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/build-guide-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Build Guide: RoboRAVE Line Follow](/resources/build-guide-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Read More →](/resources/build-guide-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/guide-to-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Guide to RoboRave Line-Follow](/resources/guide-to-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
[Read More →](/resources/guide-to-roborave-line-follow)
|
||||
|
||||
Dec 31, 2024
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How to Design a Sumo Attachment"
|
||||
date: "2024-12-18"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: ["3D Printing"]
|
||||
excerpt: "3D printed extensions such as scoops and ploughs make an excellent addition to Rovers in a sumo battle. It is also a good introduction to Computer-Aided Design (CAD) and 3D printing.This activity will explore how to design extensions th"
|
||||
featuredImage: "/images/resources/how-to-design-a-sumo-attachment.png"
|
||||
@@ -13,7 +13,7 @@ This activity will explore how to design extensions that attach to the [rover bo
|
||||
|
||||
For an introduction to sumo, check out our [sumo activity guide](https://micromelon.com.au/resources/sumo).
|
||||
|
||||

|
||||

|
||||
|
||||
### Exercise Setup
|
||||
|
||||
@@ -27,13 +27,13 @@ Designing your extensions on paper is important before transferring them into CA
|
||||
|
||||
The side view will be the most important as this will form the basis of the CAD model. Remember to add holes where bolts can pass through and connect to the bolt clip adapter. You will also need to consider a cut-out for the ultrasonic sensor on the front face of your attachment.
|
||||
|
||||

|
||||

|
||||
|
||||
*Example of side profiles of a sumo attachment*
|
||||
|
||||
#### Stage 2
|
||||
|
||||

|
||||

|
||||
|
||||
*Dimensions for the example attachment*
|
||||
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How to Export Sensor Data From the Rover"
|
||||
date: "2023-04-11"
|
||||
categories: ["Guides"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: []
|
||||
excerpt: "In this tutorial, we will show you how to use the rover as a data collection device to assist with analysis and experiments.Why Collect Data?:While the ‘print’ function can display values on the terminal, sometimes we need to see many lines of inform"
|
||||
featuredImage: "/images/resources/how-to-export-sensor-data-from-the-rover.PNG"
|
||||
@@ -15,11 +15,7 @@ While the ‘print’ function can display values on the terminal, sometimes we
|
||||
|
||||
## How to Use the Code:
|
||||
|
||||
Shown below is the code used to collect data from the rover. Note that this code must be used in an external code editor. Not sure how to do this? Click the button below for our tutorial on getting stared with external code editors:
|
||||
|
||||
[
|
||||
Getting Setup with the Micromelon Python Module
|
||||
](getting-started-with-the-python-module)
|
||||
Shown below is the code used to collect data from the rover. Note that this code must be used in an external code editor. Not sure how to do this? Click the button below for our tutorial on getting stared with external code editors:[Getting Setup with the Micromelon Python Module](getting-started-with-the-python-module)
|
||||
|
||||
Shown below is the whole code used to record sensor data from the rover. Once the code has completed running, there will be a ‘data.csv’ file in the same folder as the code which contains the recorded data. Make sure to copy the data to an excel file as this file is overwritten each time the code is run.
|
||||
|
||||
@@ -201,7 +197,7 @@ while (current_time() - start_recording) < 3:
|
||||
|
||||
## Demonstration:
|
||||
|
||||
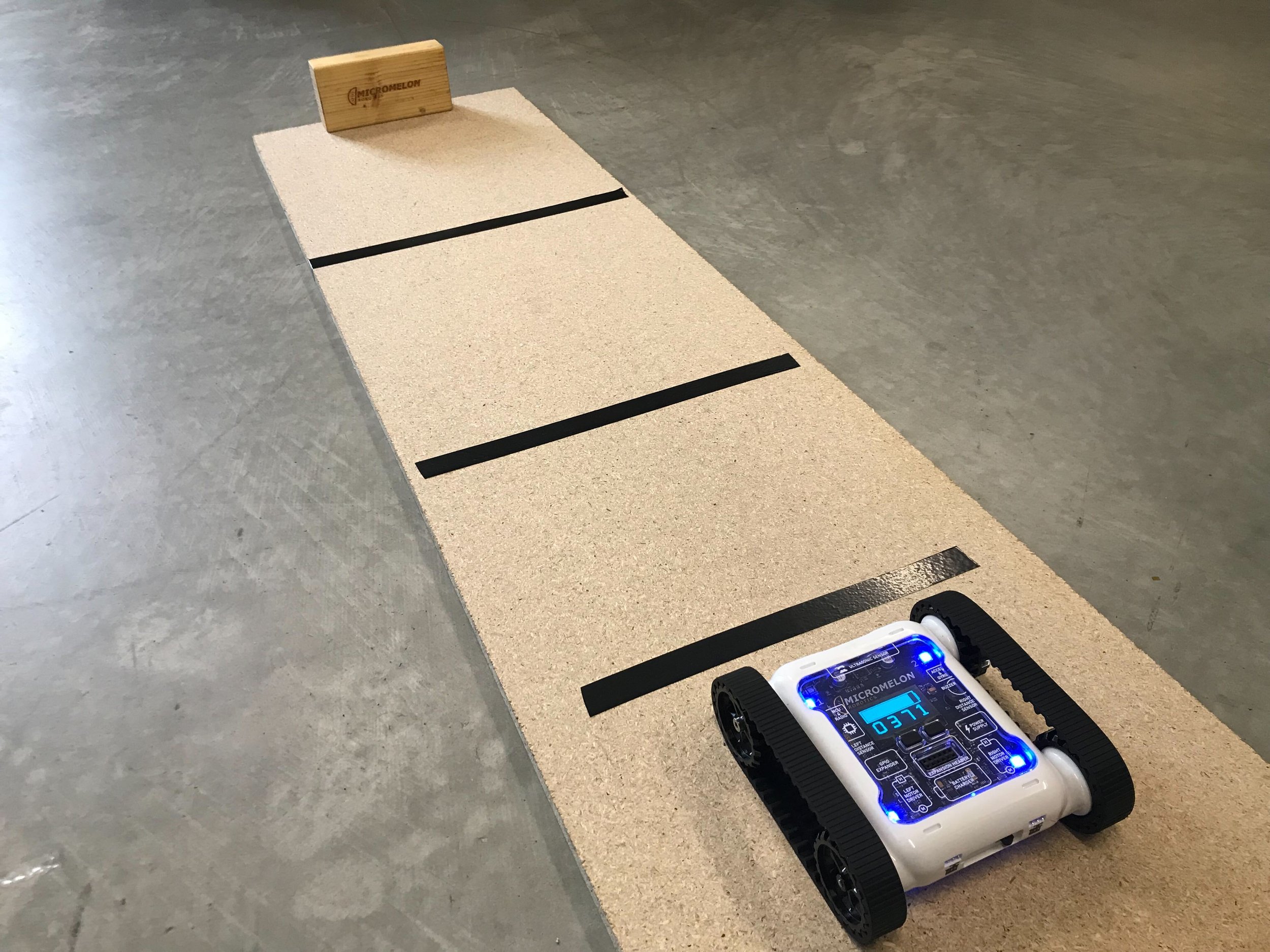
|
||||

|
||||
|
||||
In our demonstration, we will setup the rover on the platform as shown. The idea is for the rover to drive forward, and record the brightness from each colour sensor. Data point collection has been limited to once every 500 loops and recording will stop when the ultrasonic sensor sees the block at the end of the platform. Shown below is the configuration of the code that was used:
|
||||
|
||||
@@ -299,6 +295,6 @@ rc.end()
|
||||
|
||||
Once the code was run, the ‘data.csv’ file was opened up in Microsoft Excel, and graphed.
|
||||
|
||||
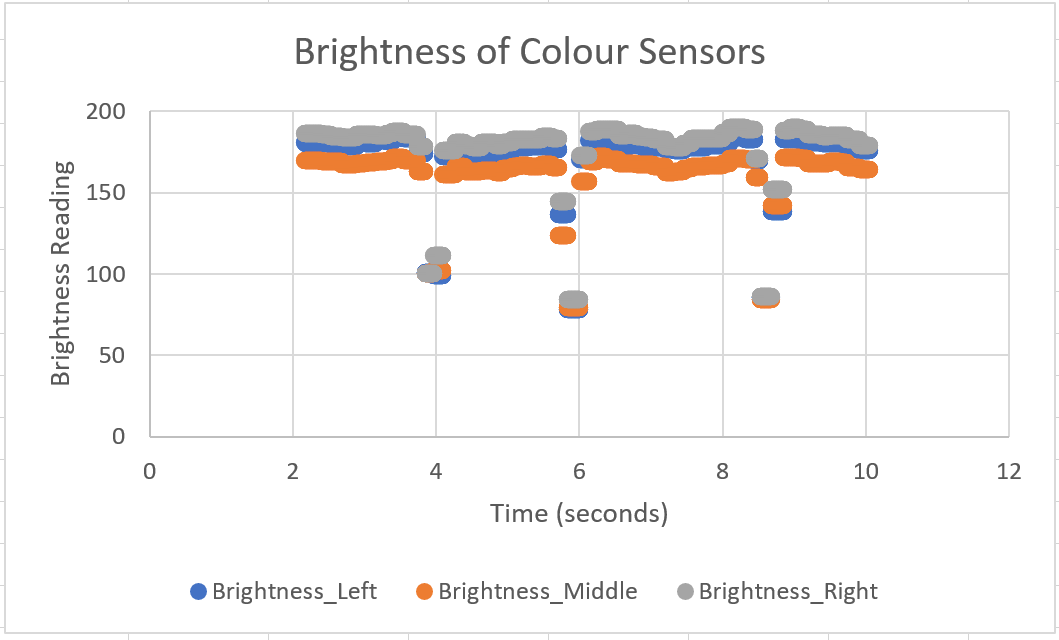
|
||||

|
||||
|
||||
Looking at the graph, we are now able to analyse how the sensors interpret the platform and the shade of the tape. There are three distinct drops in the data where the rover passed over the tape. This information can be used to easily analyse the brightness readings of each colour sensor on different surfaces.
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "How to Maintain a 3D Printer"
|
||||
date: "2022-11-25"
|
||||
categories: ["Guides"]
|
||||
categories: ["3D Printing Guides"]
|
||||
tags: ["Guides", "3D Printing"]
|
||||
excerpt: "Like any machine, 3D printers wear out after long periods of use and require maintenance. Printers should be consistently maintained to prevent degradation in print quality and to reduce damage to the printer itself. This guide will take you through"
|
||||
featuredImage: "/images/resources/how-to-maintain-a-3d-printer.JPG"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
Like any machine, 3D printers wear out after long periods of use and require maintenance. Printers should be consistently maintained to prevent degradation in print quality and to reduce damage to the printer itself. This guide will take you through some main focus points regarding caring for a 3D printer.
|
||||
|
||||
@@ -17,17 +17,17 @@ Note that this guide is focused on Creality FDM printers, however, the concepts
|
||||
|
||||
Belts are usually used on 3D printers to move two or more of the axes. Belts must always be kept well-tensioned, and neglecting to maintain belt tension may lead to several issues in print quality. These issues include deformed dimensions, print surface defects, and layer shifting.
|
||||
|
||||
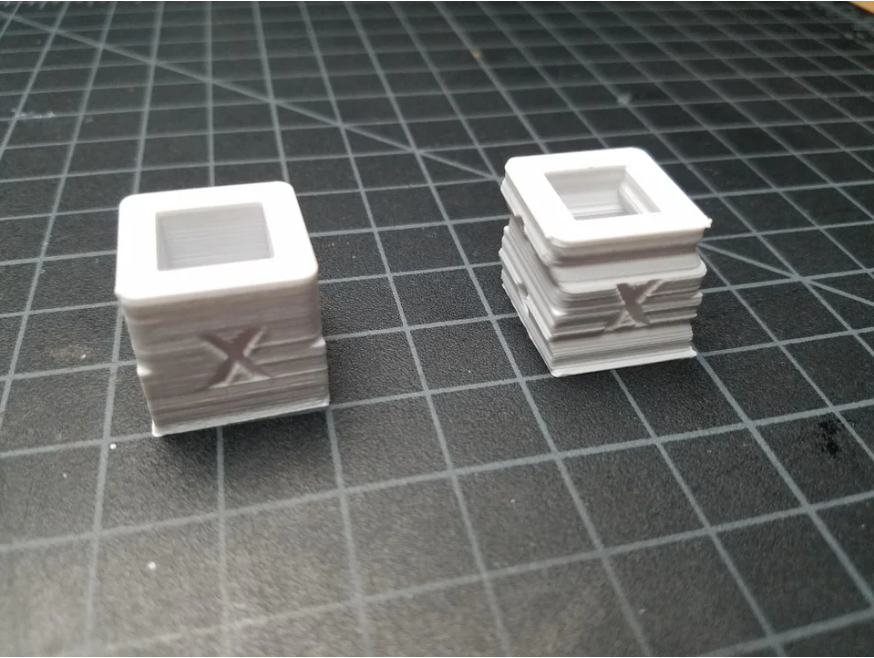
|
||||

|
||||
|
||||
*Credit: pattertj (Reddit)*
|
||||
|
||||
|
||||

|
||||
|
||||
*Credit: Fordari (Reddit)*
|
||||
|
||||
Generally, on FDM printers, each belt will have an end looped around a stepper motor and another looped around a free-running pulley. These systems will have their own way of tensioning a belt, usually a clamp on the belt or an adjustable pulley mount. To tension a belt on a printer, all that needs to be done is to increase the distance between the motor and the pulley, as seen by the red arrows in the image below. For example, on Ender 3D printers, the screws on the pulley mount can be loosened and pulled to the correct tension before tightening.
|
||||
|
||||
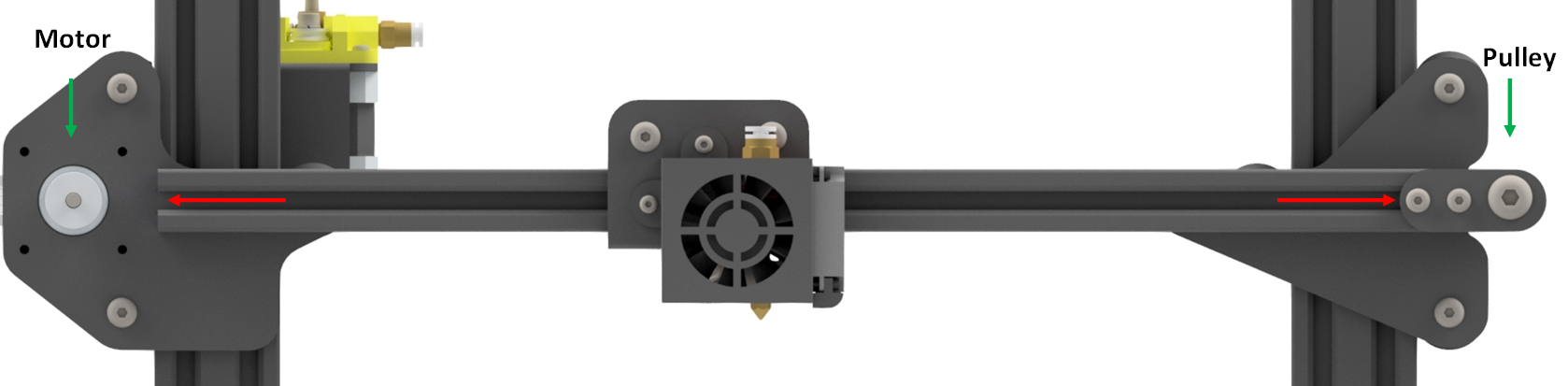
|
||||

|
||||
|
||||
The belt needs to be tight enough so it doesn’t wobble when the axis moves but not so tight that it’s hard to move the axis.
|
||||
|
||||
@@ -35,7 +35,7 @@ The belt needs to be tight enough so it doesn’t wobble when the axis moves but
|
||||
|
||||
Any printer that uses V-slot extrusion slides (like the example above) will have eccentric nuts attached to the gantry. Again, this is a different type of tightening that can cause similar issues to loose belts. If the head of the printer or the build plate is wobbling, this may indicate the eccentric nuts need tightening.
|
||||
|
||||

|
||||

|
||||
|
||||
The image above shows that an eccentric nut is just a hexagonal nut with an offset centre. Twisting this nut with a spanner (the gantry does not have to be disassembled for this) will reduce the distance between the wheels and give the gantry a tighter hold on the extrusion. Again make sure the nut is not so tight that it’s hard to move the gantry.
|
||||
|
||||
@@ -43,17 +43,17 @@ The image above shows that an eccentric nut is just a hexagonal nut with an offs
|
||||
|
||||
Many printers will, at some point, come across the issue of a print unsticking from the build plate. The frequency of this occurrence can be significantly reduced by correctly levelling the build plate. The idea is to get the nozzle to the perfect height from the build plate across the entire surface.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Raise3D*
|
||||
|
||||
First, home the 3D printer, then disable the steppers (or turn the printer off). A great way to start levelling is to use a business card between the nozzle and the bed and tighten the nuts under the bed until you feel slight resistance when the card is moved. This process should be repeated twice. Then, an excellent way to properly fine-tune the levelling is to run a calibration print (some examples below).
|
||||
|
||||
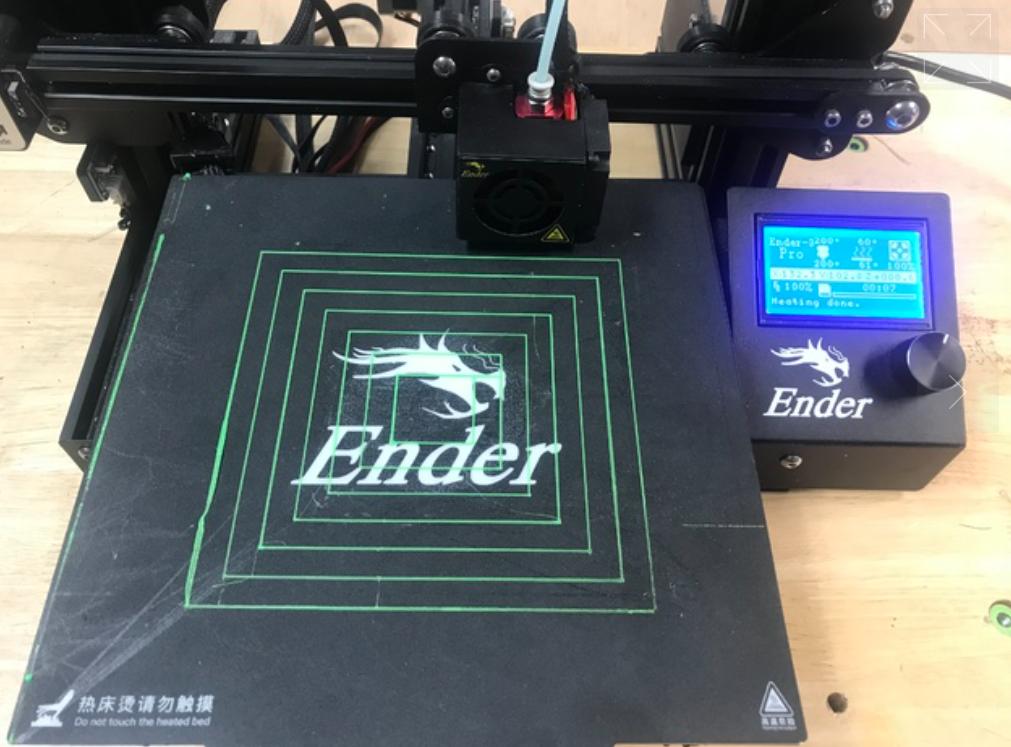
|
||||

|
||||
|
||||
Ender 3 Bed Level by Elproducts: [Link to Files](https://www.thingiverse.com/thing:3235018)
|
||||
|
||||
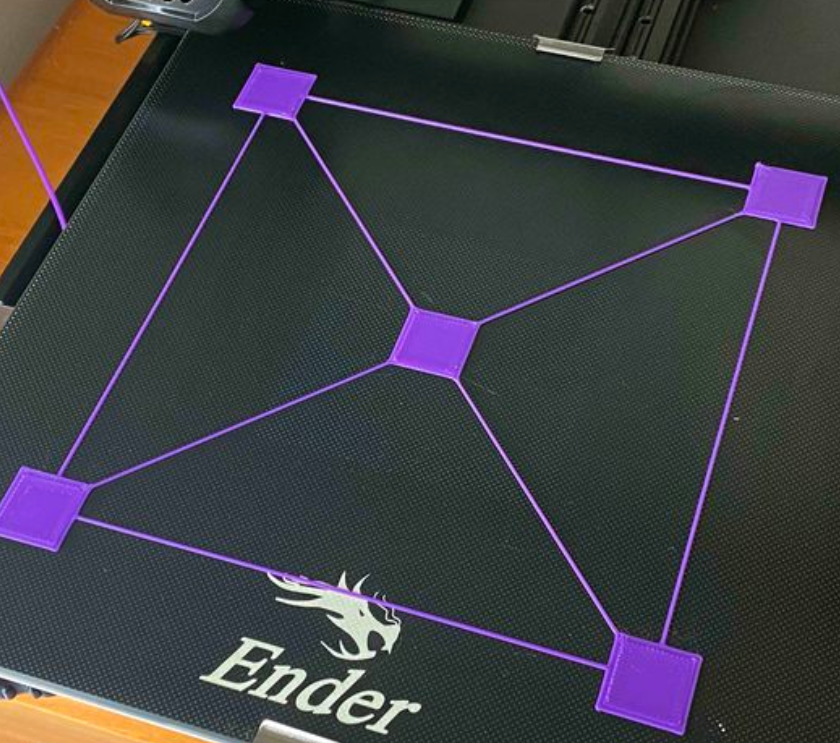
|
||||

|
||||
|
||||
Ender 3 Bed Level by sahansudeepa: [Link to Files](https://www.thingiverse.com/thing:4642274)
|
||||
|
||||
@@ -61,7 +61,7 @@ Print these files (scale them for your printer) and compare the results with the
|
||||
|
||||
## Nozzles:
|
||||
|
||||

|
||||

|
||||
|
||||
Nozzles on 3D printers eventually wear out due to the constant flow of filament through them. The time this process takes may vary depending on which filaments are used. When a nozzle begins to wear out, you may experience the following issues:
|
||||
|
||||
@@ -75,7 +75,7 @@ Nozzles on 3D printers eventually wear out due to the constant flow of filament
|
||||
|
||||
Once you have found the correct nozzle for your printer, the steps to change it out are pretty simple:
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Prusa Research*
|
||||
|
||||
@@ -93,18 +93,14 @@ While it may not seem that filament requires maintenance, proper measures must b
|
||||
|
||||
A simple and effective way to store filament is to keep the rolls in an airtight container filled with reusable desiccant. For a more advanced system, it’s possible to construct a filament Dry-Box. There are many simple designs and guides out there, such as the article written by All3D: [DIY Filament Dry Box: How to Build One on a Budget](https://all3dp.com/2/diy-filament-dry-box-tutorial/)
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
# Say Hi to Makerhero!
|
||||
|
||||
From filament, to repairs and spare parts. Micromelon has spent the last 6 years working with schools, businesses and individuals to repair, maintain and print great things. We run 3D printing training and webinars to the public focused around using 3D printers safely around students at schools, robotics clubs and at home.
|
||||
|
||||
We also own MakerHero, our very own 3D printing filament and parts brand.
|
||||
|
||||
[
|
||||
Buy Makerhero filament and parts
|
||||
](https://makerhero.com.au)
|
||||
We also own MakerHero, our very own 3D printing filament and parts brand.[Buy Makerhero filament and parts](https://makerhero.com.au)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How to Remote Control the Rover"
|
||||
date: "2024-12-12"
|
||||
categories: ["Guides"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: []
|
||||
excerpt: "Sometimes it can be useful to be able to remote control your Micromelon Rover through difficult terrain or obstacles in order to see what the sensors see. This can help students design algorithms and programs that better use the different sensors the"
|
||||
featuredImage: "/images/resources/how-to-remote-control-the-rover.jpg"
|
||||
@@ -13,11 +13,11 @@ In this guide, we’ll be going through how to use the ‘Rover View’ on the M
|
||||
|
||||
To access the Rover View, first connect the rover to the computer via the Code Editor, then click the button ‘ROVER’ with the rover icon next to the robot name:
|
||||
|
||||

|
||||

|
||||
|
||||
When clicked, this view should appear, showing you all the incoming information from the rover:
|
||||
|
||||

|
||||

|
||||
|
||||
## Keyboard Controls
|
||||
|
||||
@@ -25,16 +25,12 @@ Shown below is the keyboard layout of how the rover can be controlled.
|
||||
|
||||
When the servos are being controlled, ‘Decrease’ reduces the respective servo by 5 degrees. Repeatedly pressing ‘Decrease’ for a while will be the equivalent of setting the servo to -90 degrees in the code editor. When the rover view is initially opened, both servos are set to 90 degrees, but will only move to it once one of the servo buttons have been pressed.
|
||||
|
||||

|
||||

|
||||
|
||||
## Sensors
|
||||
|
||||
The Rover View shows a display called Sensor View when opened. This gives live information from all of the rover sensors which can be very useful for debugging and testing out how each sensor works. Shown below is a guide to the groups of sensor data:
|
||||
|
||||

|
||||

|
||||
|
||||
To learn how each of the sensors work and what the values mean, head to the rover sensor information page through the link below!
|
||||
|
||||
[
|
||||
Rover Sensors
|
||||
](/rover-sensors)
|
||||
To learn how each of the sensors work and what the values mean, head to the rover sensor information page through the link below
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How to use I2C"
|
||||
date: "2024-12-31"
|
||||
categories: ["Guides"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: ["Guide", "Guides"]
|
||||
excerpt: "I2C (I-squared-C) is a communication technique used between multiple integrated circuits. The Micromelon Rover can use the I2C protocol to communicate with other I2C-compatible devices. This can expand the rover's capabilities, like using external se"
|
||||
featuredImage: "/images/resources/how-to-use-i2c.PNG"
|
||||
@@ -13,13 +13,13 @@ I2C (I-squared-C) is a communication technique used between multiple integrated
|
||||
|
||||
Before using I2C on the rover, it is recommended to understand how it works at a basic level.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Scott Campbell - Basics of the I2C Communication Protocol*
|
||||
|
||||
I2C communication is used between a master and a slave IC (integrated circuit). The clock line (SCL) synchronises the timing of the data sent over the data line (SDA). The data can be sent back and forth between master and slave, but this cannot happen simultaneously. We refer to this as half-duplex. Multiple slaves and masters can be used with I2C, but all require a unique address.
|
||||
|
||||

|
||||

|
||||
|
||||
*Credit: Scott Campbell - Basics of the I2C Communication Protocol*
|
||||
|
||||
@@ -29,7 +29,7 @@ I2C devices have an address, which is used as an identifier. They also have regi
|
||||
|
||||
#### Writing to an I2C slave:
|
||||
|
||||
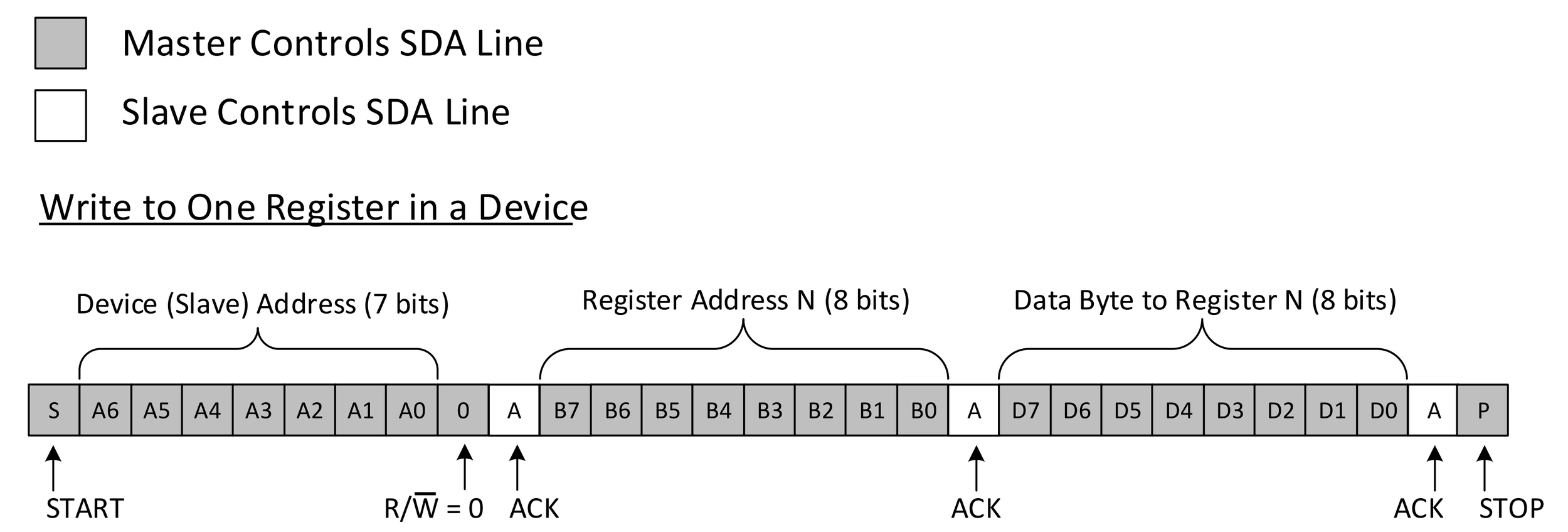
|
||||

|
||||
|
||||
*Credit: Texas Instruments - Understanding the I2C Bus*
|
||||
|
||||
@@ -43,7 +43,7 @@ When writing to an I2C device, the master first sends the start signal, followed
|
||||
|
||||
#### Reading from an I2C slave:
|
||||
|
||||
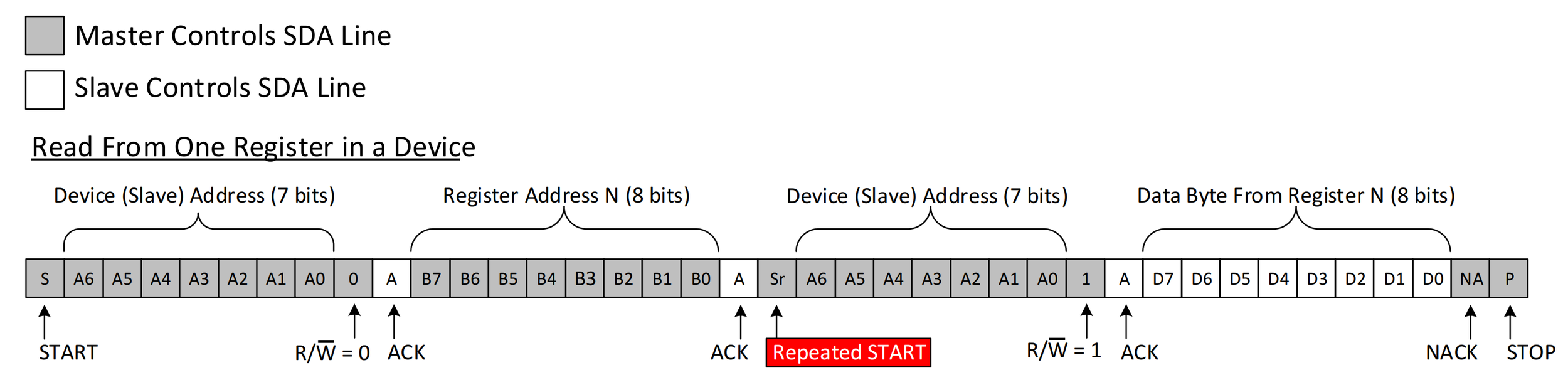
|
||||

|
||||
|
||||
*Credit: Texas Instruments - Understanding the I2C Bus*
|
||||
|
||||
@@ -55,25 +55,25 @@ The master sends the start condition again, followed by the slave's address and
|
||||
|
||||
Fortunately, the protocols are taken care of when using I2C on the rover. To wire an I2C device correctly to the rover, use the pinout below and connect SDA and SCL to the respective SDA and SCL on the device you are connecting to.
|
||||
|
||||

|
||||

|
||||
|
||||
Once connected, the coding is pretty simple regarding reading, writing and scanning.
|
||||
|
||||
#### I2C Scan:
|
||||
|
||||

|
||||

|
||||
|
||||
This code returns a list containing the addresses of all I2C devices currently connected to the rover.
|
||||
|
||||
#### I2C Read:
|
||||
|
||||

|
||||

|
||||
|
||||
This block reads from a slave device. You must specify the slave address, the register to read from, and the number of bytes to read. This code returns a list containing each byte of data read from the slave device. The data you wish to read can be greater than 1 byte.
|
||||
|
||||
#### I2C Write:
|
||||
|
||||
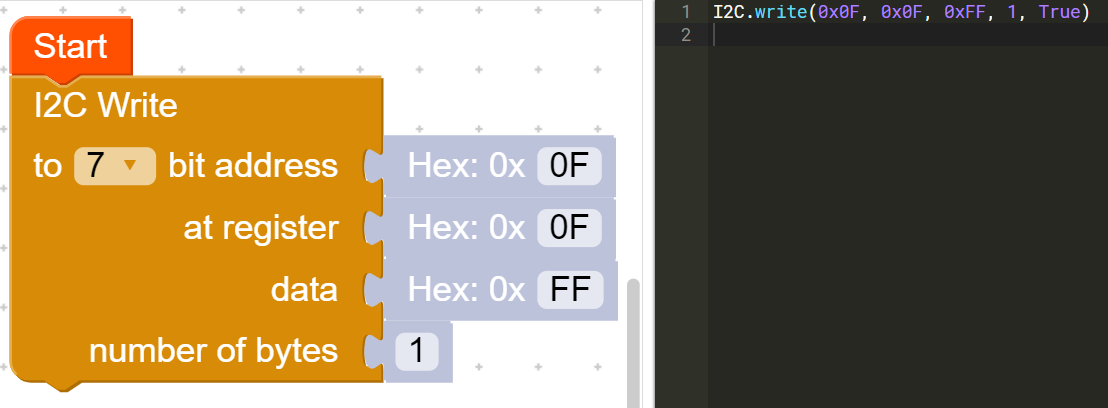
|
||||

|
||||
|
||||
This block writes to a slave device. You must specify the slave address, the register to write to, the data you wish to write, and the data length in bytes. The data you wish to write can be greater than 1 byte.
|
||||
|
||||
@@ -81,16 +81,12 @@ This block writes to a slave device. You must specify the slave address, the reg
|
||||
|
||||
#### Rover with PCA9685 Servo Driver:
|
||||
|
||||

|
||||

|
||||
|
||||
The PCA9686 servo driver is a device that allows 16 servos to be controlled using I2C communication. With this device attached, the rover can control up to 18 servos.
|
||||
|
||||
#### Rover with Arduino Nano:
|
||||
|
||||

|
||||

|
||||
|
||||
The Arduino Nano is a highly adaptable microcontroller with many I/O ports. The default I2C ports on the Nano are A4 (SDA) and A5 (SCL). The rover can use I2C to easily communicate with an Arduino. This enables the rover to access all of the I/O ports on the Nano and use these as external sensor ports. In the example above, the rover uses an Arduino Nano to receive data from a line sensor array. For more info on this project, click the button below:
|
||||
|
||||
[
|
||||
Showcase: Rover and Arduino Line Follow
|
||||
](showcase-rover-and-arduino-line-follow)
|
||||
The Arduino Nano is a highly adaptable microcontroller with many I/O ports. The default I2C ports on the Nano are A4 (SDA) and A5 (SCL). The rover can use I2C to easily communicate with an Arduino. This enables the rover to access all of the I/O ports on the Nano and use these as external sensor ports. In the example above, the rover uses an Arduino Nano to receive data from a line sensor array. For more info on this project, click the button below:[Showcase: Rover and Arduino Line Follow](showcase-rover-and-arduino-line-follow)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How To Install PyCharm"
|
||||
date: "2022-08-03"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Advanced Guides"]
|
||||
tags: ["Python", "Install Guide"]
|
||||
excerpt: "Learn how to install PyCharm"
|
||||
featuredImage: "/images/resources/install-guide-pycharm.png"
|
||||
@@ -11,144 +11,32 @@ PyCharm is a Python-specific IDE. This means it is specifically made to edit and
|
||||
|
||||
To download this IDE, go to the following link: [https://www.jetbrains.com/pycharm/download/](https://www.jetbrains.com/pycharm/download/) and download the Community version corresponding to your computer.
|
||||
|
||||

|
||||

|
||||
|
||||
Double-click on the installer once the file has finished downloading, and you should be greeted with the setup window.
|
||||
|
||||
Keep clicking “Next” until you get to the “Installation Options” screen, and ensure that you tick the following boxes:
|
||||
|
||||

|
||||

|
||||
|
||||
Finally, click “Next”, then “Install”.
|
||||
|
||||
Once PyCharm has been installed, open the application, and you should be greeted with the below screen. Next, click on the “New Project” button highlighted in red in the below screenshot.
|
||||
|
||||

|
||||

|
||||
|
||||
PyCharm will greet you with the “New Project Window”, where you can set the save location of this project. It is best that you make a folder for your project somewhere you can find it later. Once you have selected your location, click the “Create” button highlighted in red in the following image to start coding.
|
||||
|
||||

|
||||

|
||||
|
||||
PyCharm will then install Python if it hasn’t already been installed and open the code editor:
|
||||
|
||||

|
||||

|
||||
|
||||
We now need to install the Micromelon Python library so that we can communicate with the Rover. To do this, click on “View” in the top left corner of the screen, then click on “Tool Windows” in the drop-down, then finally click “Python Packages”. This will open a new panel at the bottom of the window where you can search for and install any python package. Click in the search bar highlighted in red, and type “micromelon”. Click on the result and click the “Install” button highlighted in red.
|
||||
|
||||

|
||||

|
||||
|
||||
Once the Micromelon python module has been installed, click the “-“ above the install button to close the packages panel.
|
||||
|
||||
You have completed all the steps required to setup PyCharm to use Python and the Micromelon Python Module. Follow our guide [**here **](/resources/getting-started-with-the-python-module)** ** to make your first Rover program.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "How To Install Visual Studio Code"
|
||||
date: "2022-08-03"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Advanced Guides"]
|
||||
tags: ["Python", "Install Guide", "VS Code"]
|
||||
excerpt: "Learn how to install Visual Studio Code."
|
||||
featuredImage: "/images/resources/install-guide-vs-code.png"
|
||||
@@ -17,162 +17,48 @@ You first need to install a version of the Python programming language equal to
|
||||
|
||||
Look for the part of the webpage that looks like the below image, then click the download link next to the version you wish to use.
|
||||
|
||||

|
||||

|
||||
|
||||
Scroll to the bottom of the next page until you find the “Files” section, as seen in the image below. Then click on the version corresponding to your computer. For this guide, we will be using a 64-bit Windows 10 machine, so we will click the last link.
|
||||
|
||||
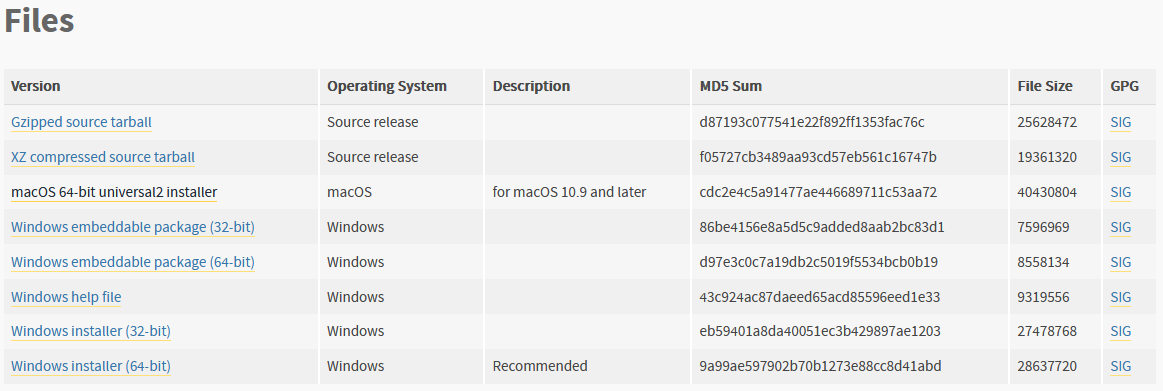
|
||||

|
||||
|
||||
Double-click on the installer once the file has finished downloading, and you should be greeted with the python Setup window. Ensure that the “Add Python 3.XX to PATH” check box is ticked down the bottom and click “Install Now”.
|
||||
|
||||

|
||||

|
||||
|
||||
Once python has finished installing, you will be shown the following screen. Click on “Disable Path Length Limit” to ensure that Python will be accessible from the command prompt.
|
||||
|
||||

|
||||

|
||||
|
||||
### **Installing VS code**
|
||||
|
||||
To download this IDE, go to the following link: [https://code.visualstudio.com/download](https://code.visualstudio.com/download) and download the version corresponding to your computer.
|
||||
|
||||

|
||||

|
||||
|
||||
Double-click on the installer once the file has finished downloading, and you should be greeted with the setup window. Keep clicking “Next” until the window shown in the next image appears, ensure that the following checkboxes are ticked, and complete the installation.
|
||||
|
||||
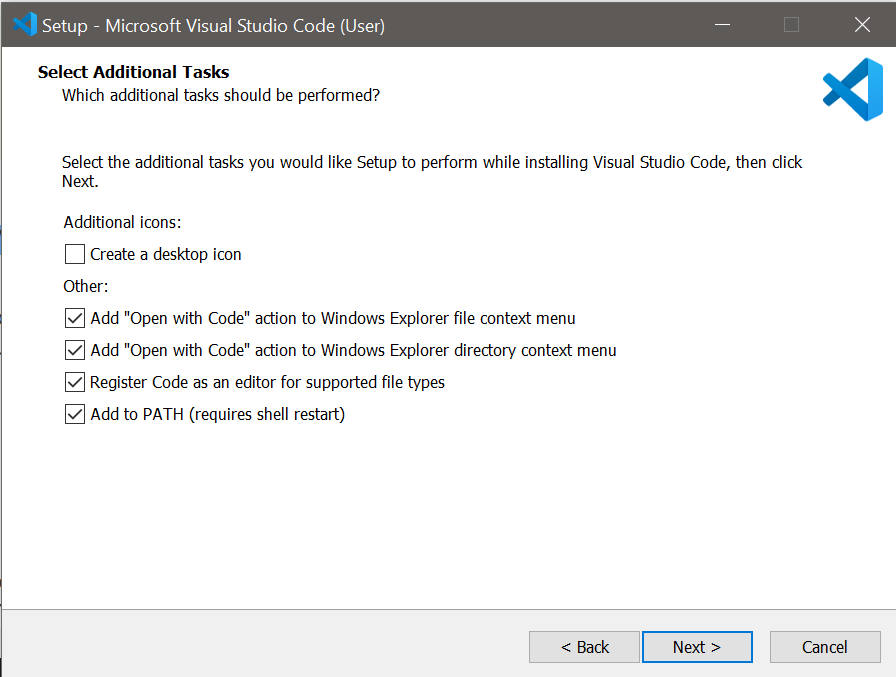
|
||||

|
||||
|
||||
Once setup has been completed, open VS Code and click on the extension’s logo on the left-hand side of the editor window. This is highlighted in red in the following image. Type “python” into the search bar, click the result highlighted in red in the following image and install it.
|
||||
|
||||

|
||||

|
||||
|
||||
Now navigate back to the project tab by clicking on the logo highlighted in red on the left-hand side of the editor window in the following image. You will need to make a folder on your computer where we will save our first project. Once you have made a folder, click on the “Open Folder” button highlighted in red in the below image to open it in VS code. It is best that you make a folder for your project somewhere you can find it later.
|
||||
|
||||

|
||||

|
||||
|
||||
We can now make a new Python file by clicking on the “New File” button and then clicking on “Python File” seen highlighted in red in the following image:
|
||||
|
||||

|
||||

|
||||
|
||||
We now need to install the Micromelon Python module, allowing you to connect to and program the Rover. To do this, click on the “Terminal” button highlighted in red, then click “New Terminal” in the drop-down. This will open a new panel at the bottom of the window where you can interact with the Windows Terminal, highlighted in red in the following image.
|
||||
|
||||

|
||||

|
||||
|
||||
```
|
||||
`Click on the Terminal panel and type “pip install micromelon” to download and install the Micromelon Python package, as seen in the following image, and press enter.`
|
||||
```
|
||||
Click on the Terminal panel and type “pip install micromelon” to download and install the Micromelon Python package, as seen in the following image, and press enter.
|
||||
|
||||

|
||||

|
||||
|
||||
You have completed all the steps required to set up VS code to use Python and the Micromelon Python Module. Follow our guide here to make your first Rover program.
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -1,13 +1,13 @@
|
||||
---
|
||||
title: "The IR Distance Sensors"
|
||||
date: "2021-06-18"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Sensor Guides"]
|
||||
tags: []
|
||||
excerpt: "Learn what the IR distance sensors are and how to code them."
|
||||
featuredImage: "/images/resources/ir-sensor.gif"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
There are two infrared (IR) distance sensors located on the Rover. One on either side.
|
||||
|
||||
@@ -17,13 +17,11 @@ The IR sensors gives data on the distance between the robot the object the senso
|
||||
|
||||
The IR sensors work differently to the front Ultrasonic distance sensor. If you’re curious about how the Ultrasonic sensor works read our [ultrasonic sensor blog post](/resources/ultrasonic-sensor)
|
||||
|
||||
**What is IR?**
|
||||
|
||||
Before we jump into how the IR sensors work, let’s look at what IR actually is. IR stands for infrared. Infrared is a type of light. Human eyes cannot see **infrared light**. The light we see from the sun & light bulbs is called **visible light**. **Visible light** and **infrared light **are different types of light.
|
||||
**What is IR?** Before we jump into how the IR sensors work, let’s look at what IR actually is. IR stands for infrared. Infrared is a type of light. Human eyes cannot see** infrared light**. The light we see from the sun & light bulbs is called** visible light**.** Visible light ** and** infrared light** are different types of light.
|
||||
|
||||
All types of light are made up of something called electromagnetic waves. The science behind electromagnetic waves and how we see them is complicated, for now all we need to know is that they exist and they’re all around us. Electromagnetic waves vary in length, similar to how there are big waves and small waves at the beach. The diagram below shows the entire range of electromagnetic wave lengths.
|
||||
|
||||

|
||||

|
||||
|
||||
**Visible light** is electromagnetic waves with a length of 400–700 nanometres (nm).** Infrared light** is electromagnetic waves with a length of 700nm to 1mm.
|
||||
|
||||
@@ -31,7 +29,7 @@ You can see in the diagram, there are a bunch of different types of electromagne
|
||||
|
||||
**Who Can See Infrared Light?**
|
||||
|
||||

|
||||

|
||||
|
||||
Howard the snake loves code
|
||||
|
||||
@@ -45,7 +43,7 @@ Ok, now that we know a bit about IR, let’s look at how the IR sensors on the r
|
||||
|
||||
The IR sensor uses a laser to detect how far away objects are. Yes the Rover uses two IR lasers. How do these lasers help the Rover detect distance? It uses the following process:
|
||||
|
||||

|
||||

|
||||
|
||||
- The IR sensor emits an IR laser outwards.
|
||||
|
||||
@@ -79,15 +77,15 @@ In the sensor view dialog, the IR sensor values are located on the sides of the
|
||||
|
||||
255 is the returned value when an IR sensor is unable to determine an accurate value. If you are seeing 255 it means you may be attempting to detect objects further away than 1m.
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||

|
||||
|
||||
**Using The IR Sensors In Code**
|
||||
|
||||
Let’s write a simple program to print our left IR sensor values every second for 10 seconds.
|
||||
|
||||

|
||||

|
||||
|
||||
- Start by adding a **Repeat 10 Times** block.
|
||||
|
||||
@@ -106,207 +104,3 @@ When we run this; we will see the left IR distance value every second for 10 sec
|
||||
### Wrapping Up
|
||||
|
||||
Now that we’re familiar with what the IR distance sensors are, how they work and how to program them it’s time to start doing some activities. Try these activities that are done best using the IR sensors.
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/driving-school-basics)
|
||||
|
||||
Mar 14, 2022
|
||||
|
||||
[Driving School Basics](/resources/driving-school-basics)
|
||||
|
||||
Mar 14, 2022
|
||||
|
||||
Learn the basics of rover motors and sensors while navigating Duck City.
|
||||
|
||||
[Read More →](/resources/driving-school-basics)
|
||||
|
||||
Mar 14, 2022
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/maze)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
[Activity: Maze](/resources/maze)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
Learn branching, iteration, algorithm design, and how to use the Rover’s motors, ultrasonic, colour, and IR sensors.
|
||||
|
||||
[Read More →](/resources/maze)
|
||||
|
||||
Jun 4, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/lane-guidance)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Lane Guidance](/resources/lane-guidance)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn iteration, branching, algorithm design, maths, and how to use the motors, ultrasonic, and IR sensors.
|
||||
|
||||
[Read More →](/resources/lane-guidance)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/sumo)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Sumo](/resources/sumo)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn branching, iteration, algorithm design, and how to use the Rover’s motors, colour, ultrasonic, and IR sensors.
|
||||
|
||||
[Read More →](/resources/sumo)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/survey-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
[Activity: Survey Bot](/resources/survey-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
Learn iteration while using the IR sensors.
|
||||
|
||||
[Read More →](/resources/survey-bot)
|
||||
|
||||
Jun 3, 2021
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn iteration, branching, algorithm design, maths, and how to use th
|
||||
featuredImage: "/images/resources/lane-guidance.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program rovers to stay in the middle of a lane marked out by walls. This is a simplification of the lane assist technology in cars. Use the front ultrasonic sensor and both IR sensors on either side of the rover to determine where walls are and drive as smoothly through the middle of the path as you can. Don’t run into the walls!
|
||||
|
||||
@@ -71,64 +70,6 @@ The math scale block lets you convert a number from one range to another. We use
|
||||
|
||||
The left and right motor speeds are then calculated by adding/subtracting this value to a base forward speed so the rover always moves forward.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "Learning Binary"
|
||||
date: "2022-05-10"
|
||||
categories: ["All", "Guides"]
|
||||
categories: ["All", "Advanced Guides"]
|
||||
tags: []
|
||||
excerpt: "Learn the basics of binary"
|
||||
featuredImage: "/images/resources/learning-binary.jpg"
|
||||
@@ -17,138 +17,26 @@ But if computers only think in 1 and 0, do they understand numbers like 3, or 20
|
||||
|
||||
Each binary number is made up of digits each with their own value. Each digit can either be 1 or 0. If a digit is 1, that digit is ON. If it is 0, it is OFF. To get the final number you add together the values of the ON digits. Below we can see the value of the first 5 binary digits.
|
||||
|
||||

|
||||

|
||||
|
||||
To translate **18** to binary we write ** 10010**. We turn** ON ** the** 5th ** digit and the** 2st** digit.
|
||||
|
||||

|
||||

|
||||
|
||||
### Binary Examples
|
||||
|
||||
The number 3 in binary is written 11. We turn ON the first and second digit. The value of the first digit is 1 and the value of the second digit is 2. Together they equal 3.
|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
The number 5 in binary is written 101. We turn ON the first and third digit. The value of the first digit is 1 and the value of the third digit is 4. Together they equal 3.
|
||||
|
||||

|
||||

|
||||
|
||||
---
|
||||
|
||||
The number 20 in binary is written 10100. We turn ON the fifth and third digit. The value of the fifth digit is 16 and the value of the third digit is 4. Together they equal 20.
|
||||
|
||||

|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Robot Simulator](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
How to get started with the Micromelon Robot Simulator.
|
||||
|
||||
[Read More →](/resources/robot-simulator)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[Getting Started With The Micromelon Rover](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
Crash course on basic rover function, how and what to program and starter activities to attempt.
|
||||
|
||||
[Read More →](/resources/getting-started-with-the-micromelon-rover)
|
||||
|
||||
[All](/resources?category=All), [Getting Started](/resources?category=Getting+Started)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
[Activity: Prison Escape](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||
|
||||
Learn branching and iteration using the colour sensors and motors.
|
||||
|
||||
[Read More →](/resources/prison-escape)
|
||||
|
||||
[Activities](/resources?category=Activities), [All](/resources?category=All)
|
||||

|
||||
|
||||
@@ -7,15 +7,9 @@ excerpt: "Learn the colour sensor and simple algorithm design while following th
|
||||
featuredImage: "/images/resources/line-following.png"
|
||||
---
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/robot-simulator)
|
||||
|
||||
Program the rover to follow a line. Use the colour sensors on the rover to help detect where the line is and determine where the rover should move and turn to stay on the line.
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -43,68 +37,10 @@ Pick a brightness value between your line and the colour next to your line (e.g.
|
||||
|
||||
Test with different numbers! In our example, a speed difference of 8 for the motors worked well, but numbers for your rover may vary. You could even experiment with different RGB values to see if that gives you a better result.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||

|
||||

|
||||
|
||||
Sensor View in the Code Editor
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -49,7 +49,7 @@ Create a maze that students have to navigate their rover through. Use the rovers
|
||||
|
||||
-->
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -75,64 +75,6 @@ With an IF/ELSE IF/ELSE block we first check if the rover can move forward. If t
|
||||
|
||||
Our next case, the ELSE IF, will check if the left IR sensor detects a wall. If it doesn't, the way is clear & it will turn left. If it does detect a wall, it will go to the ELSE case and turn right. We then place the whole IF/ELSE IF/ELSE block in a while true loop so it will repeat this behaviour indefinitely.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2022-09-19"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon showcases their robotics platform at the QSITE CreativITy 2022 conference, connecting with Queensland's digital technologies educators."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_1520.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics exhibited at the QSITE CreativITy 2022 conference, Queensland's premier event for digital technologies educators. The conference brought together teachers, curriculum specialists, and education technology providers to explore the latest trends and tools in digital technologies education.
|
||||
|
||||
@@ -0,0 +1,14 @@
|
||||
---
|
||||
title: "Micromelon at Queensland Computers STEM Demo Day in Bundaberg"
|
||||
date: "2024-08-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon demonstrates the Rover platform at the Queensland Computers STEM Demo Day in Bundaberg, bringing hands-on robotics to regional Queensland educators."
|
||||
featuredImage: "/images/news/img_1559.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics attended the Queensland Computers STEM Demo Day in Bundaberg, setting up alongside MakerHero to showcase the full Micromelon platform to regional Queensland educators.
|
||||
|
||||
The demo day gave teachers from schools across the Wide Bay-Burnett region the chance to get hands-on with the Rover, try out the Code Editor's blocks-to-Python progression, and drive through wooden maze courses set up on the venue floor. Events like these are especially valuable for regional schools that may not have easy access to STEM education providers or the opportunity to trial robotics platforms before purchasing.
|
||||
|
||||
Micromelon's commitment to supporting schools outside of South East Queensland is a core part of the company's mission. Regional demo days help bridge the gap between metropolitan and rural schools when it comes to access to quality STEM education tools and resources.
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon at World Science Festival Ipswich"
|
||||
date: "2024-06-15"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon delivers hands-on robotics workshops at the World Science Festival in Ipswich, inspiring young learners in Western Brisbane."
|
||||
featuredImage: "/images/news/img_5748.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics attended the World Science Festival in Ipswich, delivering hands-on robotics workshops to families and students from across the Western Brisbane and Ipswich regions.
|
||||
|
||||
Set up with Rovers, laptops, and wooden maze courses, the Micromelon team guided hundreds of young participants through the basics of programming. Kids got to connect to a Rover, write their first block-based code, and watch their robot navigate through challenges in real time.
|
||||
|
||||
The Ipswich event is part of the World Science Festival's regional program, bringing science and technology experiences to communities across Queensland. For Micromelon, attending both the Ipswich and Toowoomba regional events alongside the main Brisbane festival ensures that as many students and families as possible get the chance to try educational robotics firsthand.
|
||||
|
||||
Public events continue to be one of the most effective ways for Micromelon to introduce the platform to new audiences and connect with teachers who are looking for ways to bring robotics into their classrooms.
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon at World Science Festival Toowoomba"
|
||||
date: "2024-06-08"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon brings hands-on robotics to the World Science Festival in Toowoomba, giving regional families the chance to experience coding and robotics firsthand."
|
||||
featuredImage: "/images/news/img_7421.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics brought the Rover platform to the World Science Festival in Toowoomba, giving families and young learners in the Darling Downs region the chance to experience hands-on robotics and coding.
|
||||
|
||||
Visitors to the Micromelon booth got to drive Rovers through wooden maze courses, try out the block-based coding environment, and learn about the sensors built into each Rover. The team set up interactive challenge stations where kids could program their Rover to navigate obstacles, with facilitators on hand to guide participants through their first lines of code.
|
||||
|
||||
The World Science Festival's regional events in Toowoomba and Ipswich are an important part of Micromelon's commitment to reaching communities outside of South East Queensland's metropolitan centres. Not every student has access to robotics programs at their school, and public events like these help bridge that gap by giving families a taste of what's possible with educational robotics.
|
||||
|
||||
The Toowoomba event drew strong interest from local teachers as well, with several enquiring about bringing the platform into their schools for the following term.
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Attends ACES Hardware Meetup in Sydney"
|
||||
date: "2025-02-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon presents at the ACES Hardware Meetup in Sydney, connecting with Australia's hardware startup community."
|
||||
featuredImage: "/images/news/img_7409.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics attended the ACES Hardware Meetup in Sydney, joining a community of Australian hardware companies, startups, and engineers for an evening of presentations and networking.
|
||||
|
||||
The event brought together founders and teams building physical products in Australia, covering topics from manufacturing and supply chain to product design and go-to-market strategy. Micromelon shared insights from their experience designing, manufacturing, and shipping the Rover from their Brisbane facility.
|
||||
|
||||
Connecting with the broader hardware community is valuable for a company like Micromelon that designs and manufactures a physical product locally. The meetup provided an opportunity to exchange ideas with other Australian hardware makers and learn from companies tackling similar challenges in local manufacturing and distribution.
|
||||
|
||||
The ACES community continues to grow as more Australian companies invest in building physical products, and Micromelon looks forward to staying connected with this network.
|
||||
@@ -15,7 +15,7 @@ Here at Micromelon we are continually making changes and improvements to all our
|
||||
|
||||
The first change that we’ve made is to encourage students to name their projects in ways that make code easy to find. We still randomise project names as an option, but prompt when new projects are created if the student should change their project name to what they are working on. This also helps them set an intent on what they’ll be working on for the next little while.
|
||||
|
||||
|
||||

|
||||
|
||||
**Project Explorer**
|
||||
|
||||
@@ -25,6 +25,6 @@ For teachers, this also means student projects can be viewed at the bottom of th
|
||||
|
||||
Once you’re done with all the tabs you’ve got open, you can easily close them all by pressing the “Close all open tabs” button in the project explorer next to Open Tabs. You can also open and close the project explorer at any time.
|
||||
|
||||

|
||||

|
||||
|
||||
And that’s it for now! To get the latest version, jump into the Code Editor and click File -> Check for Updates or on Mac click Micromelon IDE -> Check for updates.
|
||||
|
||||
@@ -11,9 +11,7 @@ Micromelon Code Editor 2.8.3 was released in April of 2025. This post will detai
|
||||
|
||||
## Change: Institution Account System
|
||||
|
||||
#### **The Problem**
|
||||
|
||||
Previously in the Code Editor accounts were split between home users and institution users like admins, teachers, instructors and students. Until now, there has been no easy way to transition between all of these account types. For example, once a student account is created, if you wish to remove that account from your school you would have to delete the student account and all of it’s work. This was an issue if your institution has purchased a set number of licences and changes over student accounts per term. Each time you cycle your student accounts, you would need to be delete and re-create all your students. From **Code** **Editor 2.8.3** this is no longer the case.
|
||||
#### **The Problem** Previously in the Code Editor accounts were split between home users and institution users like admins, teachers, instructors and students. Until now, there has been no easy way to transition between all of these account types. For example, once a student account is created, if you wish to remove that account from your school you would have to delete the student account and all of it’s work. This was an issue if your institution has purchased a set number of licences and changes over student accounts per term. Each time you cycle your student accounts, you would need to be delete and re-create all your students. From ** Code** ** Editor 2.8.3** this is no longer the case.
|
||||
|
||||
#### **The Solution**
|
||||
|
||||
@@ -25,11 +23,11 @@ The teacher dashboard will largely stay the same. The difference now is that ins
|
||||
|
||||
**Old: Creating Students**
|
||||
|
||||
|
||||

|
||||
|
||||
**New: Inviting Students**
|
||||
|
||||

|
||||

|
||||
|
||||
## **New: Quick Join Code**
|
||||
|
||||
@@ -37,7 +35,7 @@ Besides the old tools being updated to the invite system. There is now a new too
|
||||
|
||||
#### What is a Quick Join Code?
|
||||
|
||||

|
||||

|
||||
|
||||
Every class has a unique 9 digit Quick Join Code.
|
||||
|
||||
@@ -45,7 +43,7 @@ You can share this with your students and they can use it to join your class & s
|
||||
|
||||
You can find the Quick Join Code for a class next to the class selection dropdown.
|
||||
|
||||
|
||||

|
||||
|
||||
#### How Students Use Quick Join Codes
|
||||
|
||||
@@ -59,7 +57,7 @@ You can find the Quick Join Code for a class next to the class selection dropdow
|
||||
|
||||
Previously Micromelon Accounts were created with a username, password and email. We’ve now added the ability to sign in through your **Google**,** Microsoft**, and** Apple** accounts.
|
||||
|
||||

|
||||

|
||||
|
||||
#### **Using The Sign-In Services**
|
||||
|
||||
@@ -75,7 +73,7 @@ After you’ve authorised Micromelon to use your service details, you’ll be re
|
||||
|
||||
We’ve built a new tool for recording sensor data from the rover during program execution. After running a program, users can open up the new **Data Recorder** tool and download a spreadsheet which contains all values captured by the onboard rover sensors. Let’s look at how to use the data recorder.
|
||||
|
||||
|
||||

|
||||
|
||||
#### Using The Data Recorder In The Code Editor
|
||||
|
||||
@@ -87,7 +85,7 @@ We’ve built a new tool for recording sensor data from the rover during program
|
||||
|
||||
- Press **Save To CSV** to save your `.csv` .file to your computer
|
||||
|
||||
|
||||

|
||||
|
||||
#### Using The Data After Saving
|
||||
|
||||
@@ -113,6 +111,4 @@ We’re always aiming to improve the Code Editor. In this release we have update
|
||||
|
||||
To get the latest version,
|
||||
|
||||
- Microsoft Users: Open the Code Editor. In the top bar click **File** -> **Check for Updates**
|
||||
|
||||
- Mac Users: Open the Code Editor. In the app menu click **Micromelon IDE** -> **Check for Updates**.
|
||||
- Microsoft Users: Open the Code Editor. In the top bar click **File **->** Check for Updates **- Mac Users: Open the Code Editor. In the app menu click** Micromelon IDE **->** Check for Updates**.
|
||||
|
||||
@@ -1,18 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Exhibits at EduTECH Australia 2023"
|
||||
title: "Micromelon Heads to EduTECH Australia 2023"
|
||||
date: "2023-08-24"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon showcases their complete robotics education platform at EduTECH Australia 2023, the country's largest education technology conference."
|
||||
featuredImage: "/images/logo.png"
|
||||
excerpt: "Micromelon exhibits at EduTECH Australia 2023, the country's largest education technology conference, showcasing the full robotics platform to educators from across the country."
|
||||
featuredImage: "/images/products/rover-candid.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics exhibited at EduTECH Australia 2023, the country's largest education technology conference and expo, held at the Melbourne Convention and Exhibition Centre. The event brought together thousands of educators, administrators, and EdTech providers from across Australia and the Asia-Pacific region.
|
||||
Micromelon Robotics exhibited at EduTECH Australia 2023, the country's largest education technology conference and expo. The event brought together thousands of educators, administrators, and EdTech providers from across Australia and the Asia-Pacific region.
|
||||
|
||||
At the Micromelon stand, visitors explored the full platform ecosystem: the Micromelon Rover with its range of 3D-printed attachments, the Code Editor with its unique blocks-to-Python progression, the Robot Simulator for virtual learning, and the classroom management tools that help teachers monitor and guide student progress in real time.
|
||||
|
||||
EduTECH provided an opportunity to connect with school leaders and decision-makers from interstate, expanding Micromelon's reach beyond its Queensland home base. Conversations at the booth highlighted growing demand from schools in New South Wales, Victoria, and South Australia for robotics platforms that are curriculum-aligned and teacher-friendly.
|
||||
|
||||
The team also presented on the topic of integrating robotics across the curriculum, demonstrating how the Micromelon platform can be used not just in Digital Technologies classes but also in mathematics, science, and design and technologies subjects.
|
||||
|
||||
EduTECH 2023 reinforced Micromelon's growing reputation as a serious player in the Australian education technology landscape and generated significant interest from schools looking to adopt or expand their robotics programs.
|
||||
|
||||
16
content/resources/micromelon-exhibits-edutech-2025.mdx
Normal file
16
content/resources/micromelon-exhibits-edutech-2025.mdx
Normal file
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Returns to EduTECH Australia 2025"
|
||||
date: "2025-08-20"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon exhibits at EduTECH Australia for the third time, showcasing the latest platform updates to educators from across the country."
|
||||
featuredImage: "/images/news/img_7393.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics returned to EduTECH Australia in 2025, marking the team's third appearance at the country's largest education technology conference. The event continues to be a key opportunity to connect with educators, school leaders, and technology decision-makers from across Australia and the Asia-Pacific region.
|
||||
|
||||
The Micromelon booth showcased the latest platform updates, including new features in the Code Editor and Robot Simulator, along with the full range of 3D-printed Rover attachments. Visitors had the chance to drive Rovers through challenge courses and see the blocks-to-Python coding progression in action.
|
||||
|
||||
Each year at EduTECH has brought new connections and partnerships. What started as an opportunity to introduce Micromelon to the broader Australian education community has evolved into a chance to catch up with existing school partners, share product updates, and hear directly from teachers about what's working in their classrooms.
|
||||
|
||||
EduTECH remains one of the highlights of the Micromelon calendar, and the team looks forward to continuing to grow their presence at the event in the years to come.
|
||||
@@ -7,7 +7,7 @@ excerpt: "Tim from Micromelon meeting with Design Technology teachers at Cairns
|
||||
featuredImage: "/images/resources/micromelon-heads-north-to-cairns-state-high-school.jpg"
|
||||
---
|
||||
|
||||

|
||||

|
||||
|
||||
Tim from Micromelon meeting with Design Technology teachers at Cairns State High School showing off some of the 3D printed parts they can use with the Micromelon Rover and collecting some future feature ideas for the Micromelon Robot Simulator
|
||||
|
||||
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Hosts RoboRAVE Australia 2023"
|
||||
date: "2023-10-20"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon hosts RoboRAVE Australia for the first time, bringing hundreds of students together at the University of the Sunshine Coast for one of the country's largest student robotics competitions."
|
||||
featuredImage: "/images/news/img_7860.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics hosted RoboRAVE Australia for the first time in 2023, welcoming hundreds of students from across the country to the University of the Sunshine Coast for one of Australia's largest student robotics competitions.
|
||||
|
||||
RoboRAVE brings together school teams to compete in a range of robotics challenges, from line following and sumo battles to freestyle innovation events. As the host, Micromelon was responsible for organising the competition, coordinating with schools and teams, and ensuring the event ran smoothly across the multi-day program.
|
||||
|
||||
The arena at UniSC was packed with students in colourful team shirts, with the opening ceremony drawing an enormous crowd. The energy and excitement of hundreds of kids competing, collaborating, and problem-solving with their robots was exactly the kind of outcome Micromelon works toward every day.
|
||||
|
||||
Taking on the hosting role for RoboRAVE Australia was a significant step for Micromelon, reflecting the company's growing position at the centre of the Australian robotics education community. The event's success set the stage for Micromelon to continue hosting in subsequent years, including the 2024 World Championships.
|
||||
@@ -4,14 +4,14 @@ date: "2019-07-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon Robotics joins the University of Queensland's ilab Accelerator program, gaining access to mentorship, resources, and a network of innovators."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/partners/uq.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics has been accepted into the University of Queensland's ilab Accelerator, one of Australia's longest-running and most respected university startup programs. The program provides intensive mentorship, business development support, and access to UQ's extensive research and industry networks.
|
||||
|
||||
Joining ilab marked a significant step in Micromelon's growth journey. The accelerator helped the team refine their go-to-market strategy, strengthen customer relationships with schools, and plan for interstate expansion. Working alongside other ambitious startups provided a collaborative environment that pushed the team to think bigger.
|
||||
|
||||
The ilab program also connected Micromelon with experienced mentors from the education technology and hardware sectors. These advisors helped the team navigate the unique challenges of selling into schools — from procurement cycles and budget constraints to curriculum alignment and professional development requirements.
|
||||
The ilab program also connected Micromelon with experienced mentors from the education technology and hardware sectors. These advisors helped the team navigate the unique challenges of selling into schools - from procurement cycles and budget constraints to curriculum alignment and professional development requirements.
|
||||
|
||||
During the program, Micromelon expanded its pilot deployments and gathered extensive feedback from teachers and students. This feedback directly influenced the development of features like the built-in lesson plans, classroom controls, and the progressive blocks-to-Python coding pathway that would become hallmarks of the platform.
|
||||
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2021-02-15"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon partners with the Australian Computer Society to deliver robotics workshops through the Gateway to Industry Schools Program across Queensland."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_7686.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics has partnered with the Australian Computer Society (ACS) to deliver robotics and coding workshops through the Gateway to Industry Schools Program (GISP) across Queensland. The partnership connects Micromelon's hands-on robotics platform with ACS's extensive network of schools, providing students with industry-relevant STEM experiences.
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2022-06-29"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon delivers a public robotics workshop in partnership with Cross River Rail, introducing families to coding and engineering at Brisbane's Experience Centre."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_6121.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics partnered with Cross River Rail to deliver a public robotics workshop at the Cross River Rail Experience Centre in Brisbane. The event introduced families and young learners to coding and robotics through hands-on activities with the Micromelon Rover.
|
||||
|
||||
@@ -4,13 +4,13 @@ date: "2018-05-22"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon presents at the IEEE International Conference on Robotics and Automation (ICRA) 2018 in Brisbane, showcasing their educational robotics platform to a global audience."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_0013.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics presented at the IEEE International Conference on Robotics and Automation (ICRA) 2018, held in Brisbane. ICRA is one of the world's largest and most prestigious robotics conferences, attracting researchers, engineers, and industry leaders from across the globe.
|
||||
|
||||
The conference provided Micromelon with a unique platform to showcase the Rover and its integrated coding environment to an international audience of robotics professionals. The team demonstrated how the platform bridges block-based and text-based programming, making robotics accessible to students from grade 3 through to senior secondary.
|
||||
|
||||
Presenting at ICRA connected Micromelon with leading robotics researchers, potential collaborators, and organisations exploring how educational robotics can inspire the next generation of engineers and computer scientists. The feedback reinforced that the team's approach — a purpose-built educational robot paired with progressive software — addressed a genuine gap in the market.
|
||||
Presenting at ICRA connected Micromelon with leading robotics researchers, potential collaborators, and organisations exploring how educational robotics can inspire the next generation of engineers and computer scientists. The feedback reinforced that the team's approach - a purpose-built educational robot paired with progressive software - addressed a genuine gap in the market.
|
||||
|
||||
Having ICRA hosted in their home city of Brisbane made the opportunity especially meaningful. The conference put Micromelon on the international radar and opened conversations that would shape the platform's development in the years ahead.
|
||||
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon at World Robots Summit with Trade and Investment Queensland"
|
||||
date: "2018-10-20"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon showcases the Rover at the World Robots Summit as part of the Trade and Investment Queensland delegation, representing Queensland's robotics industry on the world stage."
|
||||
featuredImage: "/images/news/img_0020.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics represented Queensland at the World Robots Summit, attending as part of a delegation supported by Trade and Investment Queensland (TIQ). The event brought together robotics companies, researchers, and innovators from around the world.
|
||||
|
||||
The Micromelon Rover was displayed alongside other Queensland robotics technologies, highlighting the state's growing reputation as a hub for robotics innovation. The TIQ booth featured a Queensland Robotics banner and showcased the breadth of robotics work happening in the state.
|
||||
|
||||
For a young Brisbane startup, the World Robots Summit was an important opportunity to connect with the global robotics community and gain exposure on an international stage. The experience helped shape Micromelon's approach to product development and reinforced the team's belief in the potential of educational robotics.
|
||||
|
||||
The event was one of several international milestones for Micromelon in 2018, a year that also included presenting at ICRA and winning the People's Choice Award at the Young Starters competition.
|
||||
@@ -1,18 +0,0 @@
|
||||
---
|
||||
title: "Micromelon Pivots to Remote Learning During COVID-19"
|
||||
date: "2020-04-01"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "When COVID-19 forces schools to close, Micromelon rapidly adapts its platform for remote learning with the Robot Simulator and virtual classroom tools."
|
||||
featuredImage: "/images/logo.png"
|
||||
---
|
||||
|
||||
When COVID-19 forced schools across Australia to close their doors in early 2020, Micromelon Robotics moved quickly to ensure students could continue learning robotics and coding from home. The team accelerated the development and release of the Micromelon Robot Simulator — a 3D virtual environment that lets students write and test code without needing a physical Rover.
|
||||
|
||||
The pivot to remote learning was a defining moment for the company. While competitors who relied solely on physical hardware struggled to stay relevant during lockdowns, Micromelon's integrated platform approach — combining hardware, software, and simulation — proved its value. Teachers could assign coding challenges and monitor student progress entirely through the Code Editor and Simulator.
|
||||
|
||||
Micromelon also developed new resources and lesson plans specifically designed for remote delivery. These materials helped teachers who were already overwhelmed by the transition to online teaching to continue offering meaningful STEM experiences without additional complexity.
|
||||
|
||||
The response from schools was overwhelmingly positive. Many educators who discovered the Simulator during lockdowns continued using it even after returning to the classroom, finding it valuable for homework, extension activities, and schools that had limited numbers of physical Rovers.
|
||||
|
||||
The COVID-19 period, while challenging, ultimately strengthened Micromelon's platform and demonstrated the resilience of its multi-product approach to robotics education.
|
||||
@@ -4,14 +4,14 @@ date: "2018-11-01"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon Robotics secures an Advance Queensland Ignite Ideas Fund grant to accelerate the development and commercialisation of their educational robotics platform."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_7792.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics has been awarded a grant through the Advance Queensland Ignite Ideas Fund, a Queensland Government initiative designed to support innovative startups in bringing their products to market.
|
||||
|
||||
The Ignite Ideas funding will accelerate the development of the Micromelon Rover and its companion Code Editor software, enabling the team to move from pilot deployments into broader commercial rollout across Australian schools. The grant supports manufacturing, software development, and the creation of curriculum-aligned teaching resources.
|
||||
|
||||
The Advance Queensland program targets high-potential startups that can deliver economic and social benefits to Queensland. Micromelon's focus on STEM education — an area of national priority — aligned strongly with the program's objectives. The grant recognised both the quality of the technology and the team's demonstrated traction with schools.
|
||||
The Advance Queensland program targets high-potential startups that can deliver economic and social benefits to Queensland. Micromelon's focus on STEM education - an area of national priority - aligned strongly with the program's objectives. The grant recognised both the quality of the technology and the team's demonstrated traction with schools.
|
||||
|
||||
Securing government backing provided important validation for Micromelon's business model and mission. With the additional resources, the team expanded its engineering capacity and began developing the classroom management tools that would become a key differentiator of the platform.
|
||||
|
||||
|
||||
@@ -4,13 +4,13 @@ date: "2017-11-08"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "University of Queensland engineering graduates found Micromelon Robotics with a mission to make robotics education accessible to every Australian student."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_0124.jpg"
|
||||
---
|
||||
|
||||
In November 2017, a team of University of Queensland engineering graduates officially founded Micromelon Robotics in Brisbane, Queensland. United by a shared passion for STEM education and a belief that robotics should be accessible to every student, the founders set out to build an educational platform that would grow with learners from primary school through to senior secondary and beyond.
|
||||
|
||||
The founding team drew on their experience in mechatronics, software engineering, and education to begin designing the Micromelon Rover — a compact, sensor-rich robot purpose-built for the classroom. Unlike hobbyist kits that required extensive assembly and troubleshooting, the Rover was envisioned as a turnkey solution that teachers could confidently deploy from day one.
|
||||
The founding team drew on their experience in mechatronics, software engineering, and education to begin designing the Micromelon Rover - a compact, sensor-rich robot purpose-built for the classroom. Unlike hobbyist kits that required extensive assembly and troubleshooting, the Rover was envisioned as a turnkey solution that teachers could confidently deploy from day one.
|
||||
|
||||
From the outset, Micromelon's mission extended beyond hardware. The team began prototyping a companion code editor that would let younger students program with drag-and-drop blocks before transitioning to Python — bridging the gap between visual and text-based coding in a single environment.
|
||||
From the outset, Micromelon's mission extended beyond hardware. The team began prototyping a companion code editor that would let younger students program with drag-and-drop blocks before transitioning to Python - bridging the gap between visual and text-based coding in a single environment.
|
||||
|
||||
Brisbane's vibrant startup ecosystem provided early support, and the founders quickly connected with educators, accelerators, and mentors who shared their vision. What started as a university project was now a company with a clear purpose: to bring real-world robotics into Australian classrooms at scale.
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2021-09-01"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "The Micromelon Rover is officially certified as Australian Made, reflecting the company's commitment to local manufacturing and quality."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/products/rover-big.png"
|
||||
---
|
||||
|
||||
The Micromelon Rover has been officially certified as Australian Made by the Australian Made Campaign, earning the right to carry the iconic green-and-gold kangaroo logo. The certification recognises that the Rover is designed, engineered, and assembled in Australia.
|
||||
|
||||
@@ -4,15 +4,15 @@ date: "2024-09-20"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "The Micromelon Rover receives an Australian Good Design Award Gold in the Product Design category, recognising excellence in design and innovation."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_1844.jpg"
|
||||
---
|
||||
|
||||
The Micromelon Rover has been awarded an Australian Good Design Award Gold in the Product Design category, one of Australia's most prestigious design accolades. The Good Design Awards, administered by Good Design Australia, recognise excellence in design and innovation across a wide range of disciplines.
|
||||
|
||||
The Gold award — the highest tier — acknowledged the Rover's thoughtful industrial design, its educational impact, and the seamless integration between hardware and software that defines the Micromelon platform. Judges praised the Rover's compact form factor, its durability in classroom environments, and the clever attachment system that allows students to expand the robot's capabilities with 3D-printed accessories.
|
||||
The Gold award - the highest tier - acknowledged the Rover's thoughtful industrial design, its educational impact, and the seamless integration between hardware and software that defines the Micromelon platform. Judges praised the Rover's compact form factor, its durability in classroom environments, and the clever attachment system that allows students to expand the robot's capabilities with 3D-printed accessories.
|
||||
|
||||
The Good Design Awards jury highlighted the Rover's ability to serve a wide age range — from grade 3 through to senior secondary — as a standout feature. The progressive coding pathway, from visual blocks to Python, was recognised as an innovative approach to scaffolding learning in computer science.
|
||||
The Good Design Awards jury highlighted the Rover's ability to serve a wide age range - from grade 3 through to senior secondary - as a standout feature. The progressive coding pathway, from visual blocks to Python, was recognised as an innovative approach to scaffolding learning in computer science.
|
||||
|
||||
Winning the Gold award places the Micromelon Rover alongside some of Australia's best-designed products and reinforces the team's commitment to creating hardware that is not only functional but also thoughtfully designed for the people who use it every day — students and teachers.
|
||||
Winning the Gold award places the Micromelon Rover alongside some of Australia's best-designed products and reinforces the team's commitment to creating hardware that is not only functional but also thoughtfully designed for the people who use it every day - students and teachers.
|
||||
|
||||
"We've always believed that good design is central to good education," the Micromelon team said. "When a product is well-designed, it gets out of the way and lets learning happen. This award validates that philosophy."
|
||||
|
||||
@@ -1,10 +1,10 @@
|
||||
---
|
||||
title: "Micromelon's School Partnership Reaches 8,000+ Students"
|
||||
title: "Micromelon's ACS GISP School Partnership Reaches 8,000+ Students"
|
||||
date: "2025-03-26"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon's partnership with the ACS Gateway to Industry Schools Program has now reached more than 8,000 students across Queensland, delivering hands-on robotics workshops in hundreds of schools."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/hero/driving-school.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics' partnership with the Australian Computer Society (ACS) through the Gateway to Industry Schools Program (GISP) has now reached more than 8,000 students across Queensland. What began in 2021 as a pilot delivering robotics workshops to a handful of South East Queensland schools has grown into one of the state's largest hands-on STEM education initiatives.
|
||||
|
||||
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Sponsors RoboRAVE World Championships 2024"
|
||||
date: "2024-10-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon sponsors the RoboRAVE Australia World Championships, supporting hundreds of students competing in robotics challenges on the Sunshine Coast."
|
||||
featuredImage: "/images/news/img_3172.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics was a proud sponsor of the RoboRAVE Australia World Championships in 2024, held at the University of the Sunshine Coast. The event brought together hundreds of students from across Australia to compete in a range of robotics challenges, from line following and sumo battles to freestyle innovation events.
|
||||
|
||||
RoboRAVE is one of the largest student robotics competitions in Australia, and Micromelon's sponsorship reflects the company's commitment to supporting hands-on STEM education beyond the classroom. The energy at the event was incredible, with students of all ages working together to build, program, and compete with their robots.
|
||||
|
||||
Micromelon had a presence on the floor throughout the event, giving students and teachers the opportunity to try out the Rover platform and learn about the coding tools available for their schools.
|
||||
|
||||
Supporting events like RoboRAVE is an important part of Micromelon's mission to inspire the next generation of engineers and programmers. Seeing students apply their skills in a competitive, collaborative environment is exactly the kind of outcome the platform is designed to enable.
|
||||
16
content/resources/micromelon-sponsors-uq-racing.mdx
Normal file
16
content/resources/micromelon-sponsors-uq-racing.mdx
Normal file
@@ -0,0 +1,16 @@
|
||||
---
|
||||
title: "Micromelon Sponsors UQ Racing Formula SAE Team"
|
||||
date: "2024-04-01"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon sponsors the University of Queensland's Formula SAE racing team, supporting the next generation of engineers."
|
||||
featuredImage: "/images/news/img_2128.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics is proud to sponsor UQ Racing, the University of Queensland's Formula SAE team. The team designs, builds, and races a formula-style car each year, competing against university teams from around the world.
|
||||
|
||||
As a Brisbane-based company with deep ties to the local engineering community, sponsoring UQ Racing is a natural fit. Many of the skills students develop through Formula SAE, from CAD design and manufacturing to embedded systems and data analysis, are the same skills that Micromelon aims to introduce to younger students through its robotics platform.
|
||||
|
||||
The UQ Racing car features Micromelon Robotics branding alongside other sponsors, representing the company's support for engineering education at every level, from primary school classrooms to university workshops.
|
||||
|
||||
Micromelon's involvement with UQ Racing is part of a broader commitment to supporting the engineering pipeline in Australia, helping students at every stage of their education journey develop the skills they need for careers in technology and engineering.
|
||||
@@ -4,7 +4,7 @@ date: "2023-11-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon reaches a major milestone with over 1,000 Rovers now deployed in schools and educational organisations across Australia."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/products/rover-big.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics has reached a significant milestone: more than 1,000 Micromelon Rovers are now deployed in schools and educational organisations across Australia. From its beginnings as a Brisbane startup, the company has grown to serve hundreds of schools spanning every state and territory.
|
||||
@@ -13,6 +13,6 @@ The 1,000-Rover milestone reflects years of consistent growth driven by word-of-
|
||||
|
||||
Reaching this scale has also validated Micromelon's decision to manufacture locally in Brisbane. The team has refined its assembly and quality control processes to maintain high standards while meeting increasing demand. Every Rover is still assembled, tested, and shipped from the company's Brisbane facility.
|
||||
|
||||
Schools using the platform range from small rural primaries with a single class set of Rovers to large metropolitan secondaries with multiple sets integrated across year levels. The diversity of deployment contexts has pushed Micromelon to build a platform that is genuinely adaptable — working equally well for a grade 3 introduction to coding and a year 12 Python programming project.
|
||||
Schools using the platform range from small rural primaries with a single class set of Rovers to large metropolitan secondaries with multiple sets integrated across year levels. The diversity of deployment contexts has pushed Micromelon to build a platform that is genuinely adaptable - working equally well for a grade 3 introduction to coding and a year 12 Python programming project.
|
||||
|
||||
"Every Rover we ship represents students who are going to have a better, more engaging experience with STEM," the team reflected. "Hitting 1,000 is exciting, but we're focused on what comes next."
|
||||
|
||||
@@ -4,15 +4,15 @@ date: "2024-05-17"
|
||||
categories: ["All", "Customer Stories"]
|
||||
tags: []
|
||||
excerpt: "Micromelon delivers hands-on robotics workshops at the World Science Festival Brisbane, inspiring hundreds of young learners at one of the world's premier science events."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/news/img_5748.jpg"
|
||||
---
|
||||
|
||||
Micromelon Robotics delivered hands-on robotics workshops at the World Science Festival Brisbane 2024, one of the world's premier public science events. Held across multiple venues in Brisbane's South Bank, the festival attracted tens of thousands of visitors, including families, students, and science enthusiasts from across Australia.
|
||||
|
||||
Micromelon's workshop sessions gave young participants the chance to program Rovers through a series of guided challenges, starting with simple driving tasks and progressing to more complex activities involving sensors and automated navigation. Facilitators from the Micromelon team guided groups through the basics of block-based coding, ensuring every participant — regardless of prior experience — could successfully program their Rover.
|
||||
Micromelon's workshop sessions gave young participants the chance to program Rovers through a series of guided challenges, starting with simple driving tasks and progressing to more complex activities involving sensors and automated navigation. Facilitators from the Micromelon team guided groups through the basics of block-based coding, ensuring every participant - regardless of prior experience - could successfully program their Rover.
|
||||
|
||||
The World Science Festival workshops demonstrated Micromelon's ability to deliver engaging STEM experiences in high-volume public settings. Sessions ran throughout the festival, with hundreds of children and families participating across the multi-day event.
|
||||
|
||||
Parents and educators who attended the sessions frequently asked about bringing the Micromelon platform into their schools, highlighting the value of public events in generating awareness and demand for robotics education.
|
||||
|
||||
"Events like the World Science Festival remind us why we do what we do," the Micromelon team shared. "Seeing a child's face light up when their code makes a robot move for the first time — that's what it's all about."
|
||||
"Events like the World Science Festival remind us why we do what we do," the Micromelon team shared. "Seeing a child's face light up when their code makes a robot move for the first time - that's what it's all about."
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2018-03-20"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon Robotics wins the QUT Bluebox Robotics Accelerator, gaining mentorship and resources to develop their educational robotics platform."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/awards/bluebox.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics has been named the winner of the QUT Bluebox Robotics Accelerator program, a competitive program run by Queensland University of Technology to support early-stage robotics ventures in Queensland.
|
||||
|
||||
@@ -4,7 +4,7 @@ date: "2018-05-15"
|
||||
categories: ["All", "News & Updates"]
|
||||
tags: []
|
||||
excerpt: "Micromelon Robotics wins the People's Choice Award at the Young Starters competition, recognising the team's innovative approach to STEM education."
|
||||
featuredImage: "/images/logo.png"
|
||||
featuredImage: "/images/awards/young-starters.png"
|
||||
---
|
||||
|
||||
Micromelon Robotics has taken home the People's Choice Award at the Young Starters competition, a program celebrating outstanding young entrepreneurs across Queensland's startup ecosystem.
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn branching and iteration using the colour sensors and motors."
|
||||
featuredImage: "/images/resources/prison-escape.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Use the colour sensors to find and drive through the gap in the box. Rovers start in the middle facing a random direction and must leave through the gap, they cannot drive over the lines.
|
||||
|
||||
@@ -81,64 +80,6 @@ When our rover does not see the tape we must just use a motor block to set the r
|
||||
|
||||
We want to repeat this behaviour until the rover finds the exit so we put all our code in a repeat while true loop.
|
||||
|
||||
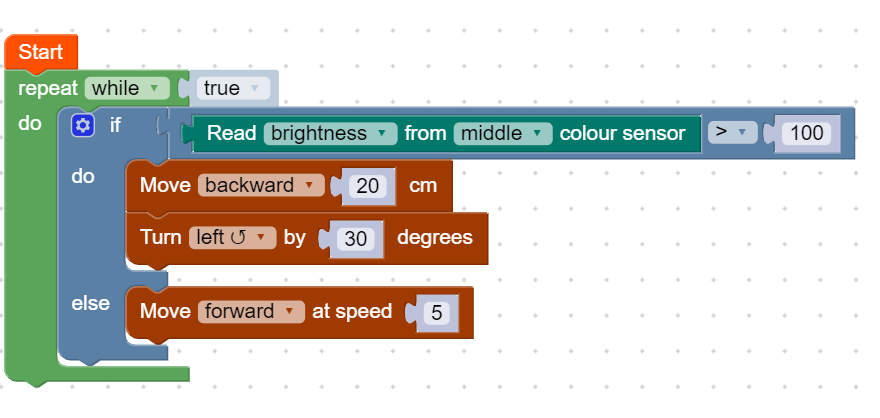
|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Branching and looping with the ultrasonic sensor."
|
||||
featuredImage: "/images/resources/puppy-bot.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program the rover to act like a puppy. When the rover detects an object within 50cm using the ultrasonic sensor have the rover charge forward. Once the rover gets within 20cm from the object it stops and waits for it to move. When the puppy bot can’t see anything with the ultrasonic, slowly spin on the spot looking for something to follow.
|
||||
|
||||
@@ -75,64 +74,6 @@ Place the appropriate motor blocks for the conditions. When the rover is station
|
||||
|
||||
We want to repeat this behaviour forever so place everything inside a repeat while true loop.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -11,7 +11,7 @@ featuredImage: "/images/resources/random-bug-bot-2.png"
|
||||
|
||||
Build from the Basic Bug Bot exercise but program the rover to have a more complex lifecycle. Create a mesh of food markers on the ground for the rover to detect with colour sensors. The new bug bot rover should now have health that goes down each second as the rover gets hungry. When the rover detects food on the floor, increase the rover's health. If the rover reaches zero health it will stop (and die).
|
||||
|
||||

|
||||

|
||||
|
||||
Activity Demonstration
|
||||
|
||||
@@ -37,64 +37,6 @@ The second stage of our lifecycle is moving. We will use a left and right variab
|
||||
|
||||
The final stage of our lifecycle is reducing life and checking for death. First we reduce our life by 1. We then use an if statement to check if we have reached 0 health. If we have, we are dead, break the loop to stop our lifecycle. If we have more than 0 health, we will display the health count on the rover screen.
|
||||
|
||||
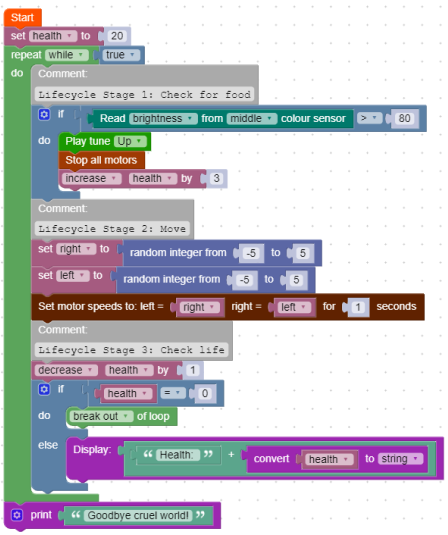
|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn branching using the motors and maths."
|
||||
featuredImage: "/images/resources/random-bug-bot.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program the rover to act like a bug and move around randomly looking for food. Using the random number math block generate a speed for each of the motors. This will create a randomly moving bug rover.
|
||||
|
||||
@@ -79,64 +78,6 @@ We need to control how long our rovers run at this speed. We can use the delay b
|
||||
|
||||
After the delay has ended we want our rover to pick new random speeds so we place the code in a repeat while true loop.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -7,7 +7,6 @@ excerpt: "Learn to avoid obstacles with the ultrasonic sensor."
|
||||
featuredImage: "/images/resources/roaming-rover.png"
|
||||
---
|
||||
|
||||
** | **
|
||||
|
||||
Program the rover to move around the room using the ultrasonic sensor to avoid running into obstacles. If the rover detects an object, turn away from the object and keep moving forward.
|
||||
|
||||
@@ -77,64 +76,6 @@ Use the IF ELSE block to turn when an obstacle is detected and drive forward whe
|
||||
|
||||
Repeat this behaviour by wrapping everything in a while loop. While true will repeat forever.
|
||||
|
||||

|
||||

|
||||
|
||||
Example Code
|
||||
|
||||
### Related Posts
|
||||
|
||||
Resources
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[Creating A Sumo Unit For Your Digital Technologies Class](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
How to run a sumo unit in your digital technologies classroom.
|
||||
|
||||
[Read More →](/resources/creating-a-sumo-unit)
|
||||
|
||||
[All](/resources?category=All)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[The Ultrasonic Sensor](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
Learn all about the ultrasonic sensor!
|
||||
|
||||
[Read More →](/resources/ultrasonic-sensor)
|
||||
|
||||
[All](/resources?category=All), [Guides](/resources?category=Guides)
|
||||
|
||||
[
|
||||
|
||||

|
||||
|
||||
](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
[Case Study: Year 7 Digital Tech at St Peters Lutheran College](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
See how Meg Foley at St Peters conducted a challenge for their Year 7s using Micromelon.
|
||||
|
||||
[Read More →](/resources/year-7-digital-tech-at-st-peters)
|
||||
|
||||
[All](/resources?category=All), [Customer Stories](/resources?category=Customer+Stories)
|
||||
|
||||
@@ -9,10 +9,10 @@ featuredImage: "/images/products/simulator-demo.gif"
|
||||
|
||||
The Micromelon Robot Simulator is now available for download on both the Microsoft Store and the Mac App Store, making it easier than ever for students and teachers to access virtual robotics environments on their school or home computers.
|
||||
|
||||
The Simulator provides a fully 3D virtual environment where students can program a simulated Micromelon Rover using the same Code Editor they use with physical robots. This means code written for the Simulator transfers directly to real hardware — and vice versa — creating a seamless learning experience.
|
||||
The Simulator provides a fully 3D virtual environment where students can program a simulated Micromelon Rover using the same Code Editor they use with physical robots. This means code written for the Simulator transfers directly to real hardware - and vice versa - creating a seamless learning experience.
|
||||
|
||||
Launching on the major app stores significantly reduced the friction of getting the Simulator installed on school-managed devices. IT administrators can now deploy the application through their standard software management tools, and students at home can install it with a single click.
|
||||
|
||||
The Simulator includes a range of built-in environments and challenges, from simple driving exercises to complex navigation tasks. Teachers can use it for homework assignments, extension activities, or as a complete standalone coding platform for schools that do not yet have physical Rovers.
|
||||
|
||||
Since its initial release during the COVID-19 remote learning period, the Simulator has been continuously improved based on teacher and student feedback. The app store launch represents the polished, production-ready version of a tool that has already proven its value in classrooms across Australia.
|
||||
Since its initial release, the Simulator has been continuously improved based on teacher and student feedback. The app store launch represents the polished, production-ready version of a tool that has already proven its value in classrooms across Australia.
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user