Major site overhaul: resources hub, content migration, new blog posts, forms
- Redesign /resources as sectioned hub with category pages - Migrate 645 Squarespace CDN images to local /images/content/ - Create 9 new news/blog posts with event photos - Fix blog post slugs (rename gibberish filenames) - Rename Design Blog to Design Blogs across site - Remove education page, replace with Platform in nav - Redesign rover repair request form with dynamic rover entries - Add school search combobox to contact, store, and repair forms - Extract shared KNOWN_SCHOOLS data - Make /rover-expansion-3d-printing dynamically pull from MDX - Add related resources sections to product pages - Fix homepage broken /quote links to /store - Store page: sample kit cards, inline quote builder, mailing list opt-in
This commit is contained in:
@@ -1,7 +1,7 @@
|
||||
---
|
||||
title: "Showcase: Rover and Arduino Line Follow"
|
||||
date: "2024-12-30"
|
||||
categories: ["Customer Stories"]
|
||||
categories: ["Advanced Guides"]
|
||||
tags: ["Extension"]
|
||||
excerpt: "Using I2C and an Arduino Nano, a QTR-8RC line sensor array can be attached to the Rover to undertake advanced line follow. This guide is a showcase of how this can be done.An overview of the I2C protocol and how to use it with the Rover can be found"
|
||||
featuredImage: "/images/resources/showcase-rover-and-arduino-line-follow.JPG"
|
||||
@@ -11,17 +11,17 @@ Using I2C and an Arduino Nano, a QTR-8RC line sensor array can be attached to th
|
||||
|
||||
An overview of the I2C protocol and how to use it with the Rover can be found here.
|
||||
|
||||

|
||||

|
||||
|
||||
## The Sensor (QTR-8RC)
|
||||
|
||||
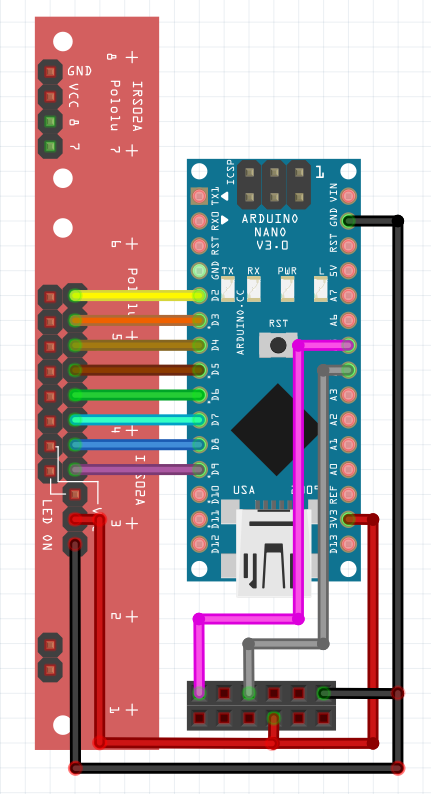
The [Pololu QTR-8RC](https://www.pololu.com/product/961) is an array of 8 infrared sensors spaced approximately 9.5cm apart. The advantage of using 8 sensors for line following is that the robot's speed can be significantly increased as there is a much lower chance of losing the line when moving. When paired with the [QTR library](https://github.com/pololu/qtr-sensors-arduino/tags), the sensor array can calculate the line's location relative to it, returned as a value between 0 and 8000. If the line is lost, the sensor also can remember the last sensor that saw the line in the array.
|
||||
|
||||

|
||||

|
||||
|
||||
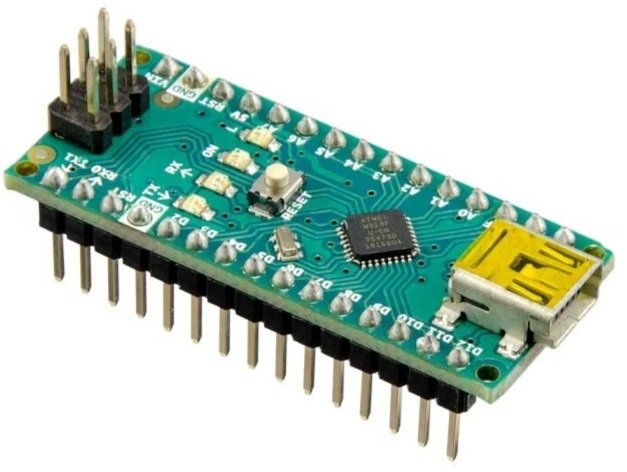
## The Arduino:
|
||||
|
||||
|
||||

|
||||
|
||||
The Arduino Nano is the microcontroller used to control the QTR sensor. With the sensor plugged in, the Arduino uses the QTR library to locate the line's position under the sensor. The Arduino can then communicate with the Rover through the I2C communication protocol. The Rover requests data and receives a buffer containing the line's location determined by the infrared sensor array. This buffer is 2 bytes large because the maximum returned value of 8000 is larger than what a single byte can hold.
|
||||
|
||||
@@ -69,9 +69,9 @@ void readSensor(){
|
||||
|
||||
```
|
||||
|
||||
|
||||

|
||||
|
||||

|
||||

|
||||
|
||||
## The Rover
|
||||
|
||||
|
||||
Reference in New Issue
Block a user